No audio available for this content.
By Simon Harris, Advanced Navigation
Lidar-based surveying is increasing in demand across a range of industries. Recent market analyses indicate that lidar surveying is a multi-billion dollar industry that is expected to deliver sustained growth for years to come. As lidar technology matures and performance increases, its range of use is broadening into surveying more complex and difficult terrain or at speeds and in environments previously unsuited to such technology. Naturally, increasing diversity and performance brings about demands for greater reliability, speed and accuracy whilst remaining within physical and regulatory limitations.
Keeping pace with market demands in UAV and rail sector lidar surveying is increasingly challenging and requires an evolving synthesis between the acquisition and processing of lidar and GNSS-INS georeferencing data. Companies such as Cordel and its subsidiary Nextcore are taking advantage of the latest technologies to develop systems that are setting new benchmarks in these sectors.
Benefits of Altitude, Faster Lidar and Precision INS
UAV lidar surveying is capable of high-resolution surveys of complex terrain, vegetated areas and in light conditions that may be unsuitable to photogrammetry. These qualities make it a preferred option in many applications. However, it must remain cost-competitive with alternative solutions to become widely adopted by the surveying industry.
Typical UAV lidar surveying is performed at ~40m AGL. This altitude commonly presents collision risks with terrain and vegetation and imposes limits where the topography changes dramatically, such as voids that increase AGL beyond acceptable limits. Higher altitude surveying, therefore, offers obvious advantages, but also deeply challenges lidar sensors and the INS. Any mismatch in operational performance and accuracy between these inevitably degrades survey quality and severely limits use of the system.
Nextcore accepted the challenge and set about developing a viable solution that could maintain a point cloud density of 200-500 points per m2 from a target altitude of 70 m. This equates to generating lidar point cloud data at millions of points per second. Achieving this required a GNSS-INS that provided suitably precise georeferencing data. Because survey data is derived from a source that is in constant motion in 3D space, the capability of the GNSS-INS is paramount in producing a digital twin of value and is critical to mission success.
After testing and evaluating various INSs from different manufacturers, Nextcore coupled its lidar with Advanced Navigation’s MEMs-based Certus Evo INS, which provides near-FOG performance and has a drift rate of 0.2 degrees/hour. This combination yielded exceptional results that allowed them to vastly extend the altitude ceiling to 120m while retaining consistent, accurate survey data.
“Operation at this altitude not only reduces the risk of collisions with trees, it enables surveyors to cover larger areas, greatly improving the solution’s efficiency,” said Ashley Cox, founder and COO of Nextcore.
Higher altitudes tend to increase the lidar swath width. The typical swath width at ~50m altitude is ~120m, depending on actual altitude and the resulting angle of incidence of lidar toward the edges of the swath. At 120m, a reliable swath width of 180m was achieved. This is a 50% increase over previous, equating to approximately 33% fewer flight-lines to survey a given area — a notable boost for productivity and efficiency to surveyors.
Payload minimization also was a critical aspect in the search for an INS, as surveyors are always seeking longer flying time. This only can be achieved with a lighter technology stack payload. The team used an OEM version of the INS for a smaller form factor that could be integrated within a single ruggedized housing. This allows a design with greater strength, weather resistance and efficient payload setup.
“The industry is constantly seeking lighter payloads for longer flight times and to fit on smaller, safer UAVs,” Cox said. “Regulatory restrictions challenge the industry to meet certain specifications. The same is true for UAV lidar. We hit a ceiling. We need to be able to improve on that, although what we’re achieving now is a real game changer.”
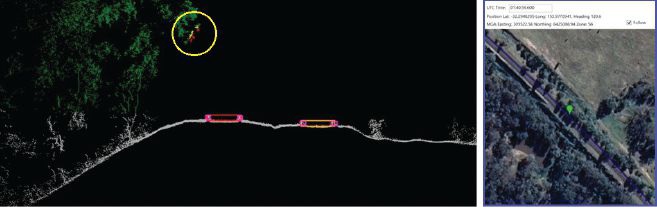
The resulting survey material contains lidar point cloud data and the geo-referencing data from the INS. All data processing is performed post-flight to ensure the highest possible accuracy. PPK is used for correction of GNSS-INS position, roll, pitch and heading data. The processed INS data is then combined with the processed point cloud data to provide absolute position to the point cloud. This system realized consistent 30~40mm precision at 120m AGL. Nextcore has integrated the lidar and INS processing platforms to automate the synthesis of data sets, reducing the survey completion time. Depending on the survey’s size and complexity, this solution can process survey data into a 3D map within 30 minutes of mission completion.
Nextcore used a Certus Evo GNSS receiver, which internally uses the u-blox ZED-F9P chip. It logs GPS L1, L2, GLONASS L1, L2, Galileo GalE1, E5, and BeiDou B1, B2 frequencies at 8 Hz. It used the Kinematica correction service running a PPK filter.

Scanning Rail Corridors Super Fast
Aerial surveying is not the only environment to present challenges to lidar and INS.
Train-mounted lidar for automated track and rail corridor surveying is another burgeoning market. This application typically uses lidar and position data to detect and identify areas of the railway that require maintenance and, perhaps more importantly, preventive maintenance. Rail surveying presents unique demands, including operating at speeds of 160km/h (100mp/h) or more, maintaining position accuracy during GNSS outages and variable environmental conditions.
Land-based surveying provides flexibility for selecting an INS compared to aerial applications, as size and weight are usually irrelevant. Rail surveying also requires an INS that provides the necessary performance while tolerating vibration and erratic movement from junctions, points and signals, and be absolutely dependable in GNSS-denied situations. Cox’s team found that the greater accuracy and better drift stability of FOG INS over MEMS provided an ideal platform for generating reliable and accurate paths of train trajectory.
Cordel tested Advanced Navigation’s Boreas digital FOG INS as a potential solution. Testing was carried out using cars as a simulation, travelling complex routes in two directions then overlaying the lidar point clouds to check for discrepancies or unsynchronized areas. The results provided the confidence to put the Boreas into service.
Railways typically traverse deep cuttings, lengthy tunnels and other environments that disrupt GNSS. It is mission-critical that the INS can apply dead reckoning the instant GNSS is disrupted and maintain accurate position for the entirety of the outage. Reliable path and location data during GNSS disruptions is central to the viability of automated rail surveying. Blind spots or zones of unreliable route data cannot be tolerated by rail operators from safety, track availability and financial perspectives.
The Cordel AI lidar analysis system can be “tuned” to the required metrics and is capable of self-learning. The AI enables the system to pre-emptively identify and flag areas of concern before they become an actual problem or hazard. Examples include measuring track gauge and alignment, ballast distribution and coverage, and clearance between potential hazards to the train. The entire route is logged, creating a “Google map” of the railway that maintains a historical record of survey data each time the track is used.
Clients can then view a representation of the lidar data to get a clear understanding of any issues and how to respond before sending personnel or assets to a location. This enables intervention before safety is compromised or remedial works become large-scale and disruptive. As a result, rail service providers can maintain safer railways, deliver more reliable services, and minimize operating costs.
GLOSSARY OF ABBREVIATIONS
AGL above ground level
AI artificial intelligence
FOG fiber-optic gyroscope
GNSS global navigation satellite system
INS inertial navigation system
MEMS micro-electromechanical system
PPK post-processing kinematic
UAV unmanned aerial vehicle