No audio available for this content.
A specialist team at the University of Wisconsin-Madison (UW-Madison) used the Routescene UAV lidar system to detect and visualize forests in Northern Wisconsin, United States, as part of the CHEESEHEAD project. The objective of the project is to improve weather forecasting by understanding how vegetation and forests influence the atmosphere. This information will be used by decision makers to develop policies that more effectively enable carbon emission reductions.
Project overview
The CHEESEHEAD project (The Chequamegon Heterogeneous Ecosystem Energy-balance Study Enabled by a High-density Extensive Array of Detectors) studies interactions and feedback between the land surface and atmosphere and how these results can be used to improve weather and climate models. Ultimately, the results will enable better carbon-emission reduction policy making.
The UAV Lidar Surveys
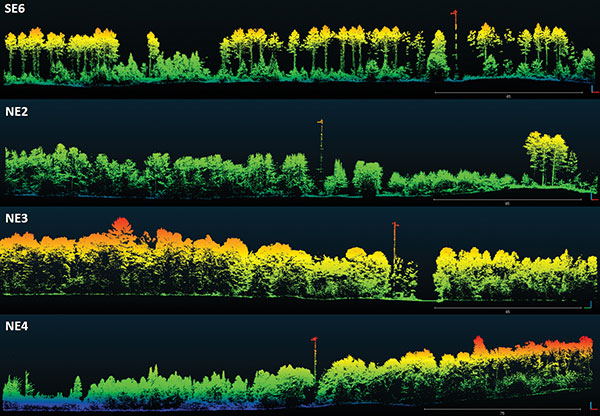
The UW-Madison team collected high density 3D point-cloud data of the prominent tree species in Wisconsin’s Chequamegon-Nicolet National Forest. Routescene’s drone-mounted lidar system captured the full tree structure, from the tree canopy to ground-level vegetation.
UAV lidar works well to quickly and efficiently survey and represent the type, shape and composition of a forest canopy. Surveys were carried out around eleven 100-foot flux towers within areas that ranged from 0.25 km² to 1 km². Six forest types were identified that included aspen, pine, poplar, larch, cedar and hardwood.
“The tall canopy of 20–30 m height created difficult flying conditions,” said Christian Andresen, UW-Madison. “It was difficult to keep a visual line of sight, so we decided to fly smaller 500 m x 500 m flights to keep sight of the drone.”
The Routescene lidar system includes a 32-laser lidar sensor providing a scan rate of up to 1.4 million points per second. Point-cloud density averaged 600 points per meter squared with a vertical accuracy of 2–5 cm.
“The Routescene system worked flawlessly and we achieved all we had planned. Over the three days, our crew of two covered a total of 4.2 km²,” Andresen said. “We were particularly impressed with the density of overlapping flight lines and the mapping of the forest structure.”
This project contributed to the wider CHEESEHEAD experiment to generate knowledge that advances the science of surface flux measurement and modelling, relevant to many scientific applications such as numerical weather prediction, climate change, energy resources and computational fluid dynamics.