No audio available for this content.
Back in September at the Institute of Navigation GNSS+ convention in Tampa, Florida, one of the papers went a long way to explaining why and how more GNSS satellites in more constellations is better. The natural assumption is that because there are more satellites, a multi-constellation receiver can choose which ones have the best signal and which provide the best solution — and it’s not always the same satellites.
Best geometry together with best signal strength obviously provide the best solution, but this might change in, for instance, a downtown urban setting for a car using a satellite navigation system. While most Western car-nav systems use only GPS, the study by Martin Escher, Mirko Stanisak, and Ulf Bestmann at the Institute of Flight Guidance, Technical University in Braunschweig, Germany, clearly shows that there is an advantage to embedding multi-constellation receivers in these systems.

The above skyplot shows a perfect reception of all GNSS satellites during a period of 14 hours — 30 usable satellites — obtained with a high-quality antenna without any obstacles. Car driving downtown will almost never encounter such good GNSS reception.
The Technical University put two different receivers in a car under static, representative, urban conditions, and went about evaluating reception against that predicted by an in-house simulation. The high-precision survey-grade receiver receiver tracked signals from all four constellations, while a lower cost receiver used in some car-nav systems was configured to only track GPS and Beidou. In this scenario, valid signals were obscured by surrounding buildings and the total number of visible satellites was reduced from 23-30 to 11-18.
The measurements validated the university simulation model and demonstrated how the high-precision receiver was able to remove multipath and other diffracted or reflected signals, while the lower cost receiver collected all available signals and therefore suffered some accuracy degradation.


The area chosen for this demonstration is dominated by narrow roads with multi-story buildings on both sides of the road. To begin, only GPS positioning was used on the test route — representing the current state-of-the-art for most production car-nav systems. For large portions of the test drive, no GPS-only position solution was achieved because of insufficient GPS measurements.

While there was some improvement in tracking using a multi-constellation receiver, when GNSS differential corrections over a mobile telecom link were incorporated, tracking performance was significantly improved. But when inertial and wheel sensors were also added into the solution, almost perfect positioning was achieved over the whole route.

Given that commercial GPS/GLONASS corrections are now available almost everywhere over a large portion of the globe and some assisted GNSS services are beginning to add both Galileo and Beidou corrections, it’s possible that downtown loss of signal for car drivers may soon be a thing of the past. And, of course, many car-nav systems currently incorporate wheel sensor inputs for dead-reckoning when GNSS is lost.
Drone use in difficult locations
Another interesting ION GNSS 2015 paper from Adam Schultz, Russell Gilabert, and Maarten Uijt de Haag of The Ohio University details the way a couple of students and their professor set out to fly a drone down corridors and within the halls of the Engineering Department. They are hoping to soon get access to the extensive maintenance tunnel system at Ohio University for more autonomous flights using newer, smaller drones.
The objective is to investigate the requirements and use of drones for missions in remote or difficult locations for applications such as large building maintenance, search and rescue, and indoor mapping.
But watch out, people in the Engineering building, if you see an unmanned hex-copter heading toward you on your way to class! Sounds like great fun as the UAV research students see the shots of the scattering inhabitants via the onboard Point Grey FireFly MV color camera!
The UAV/drone is equipped with a navigation and mapping system for both outdoor and indoor environments, using multiple laser scanners, an inertial measurement unit (IMU), barometric height and GNSS, whenever its available.
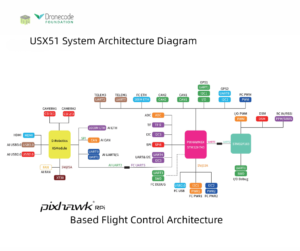
The UAV is a 3DRobotics hex-copter with a payload that includes an onboard processor, two short-range and one long-range laser range scanners, autopilot, Xsense MTI IMU, GPS receiver and a standard Wi-Fi link to relay real-time maps, trajectories and video to the remote operator.

Guidance, navigation and control (GNC) of the unmanned hex-copter is accomplished by tactical and strategic modules. In known environments, the strategic GNC keeps track of the planned and actual flight trajectories and provides the next waypoints for the mission.
In unknown environments, the strategic GNC maintains a rough estimate of trajectory and the current map of the UAV’s location. The UAV can be flown either manually by the student managing the flight controller or, when in autonomous mode, by the internal UAV flight control computer. Laser scanners provide horizontal position estimation and altitude estimation, while also collecting mapping data.
The mission manager is programmed with a simple rule-based system that uses the system’s 2D and 3D maps to control the route. The drone flies autonomously through the corridors and rooms, while the UAS operator monitors progress on a laptop. The operator can manually take control of the UAV guidance at any time.
The autopilot provides magnetometer and inertial measurements that are used to loosely maintain heading when moving from outdoors to indoors. When indoors, the lidar, inertial and optical (LION) mission controller continuously outputs position and orientation and generates short 10-30 second trajectories for the flight controller — providing a series of waypoints and required velocities for the UAV to follow.

Should this research ultimately lead to a commercial UAV implementation, it sure would help solve the huge problem we have now for generating indoor maps. The current simultaneous localization and mapping (SLAM) method for generating these indoor maps usually means somebody walks throughout a mall or office building carrying one of several indoor location systems or even taking physical measurements. If a very small UAV were to be flown safely throughout such an indoor location, data would be collected quickly, hopefully with a lot less effort than current methods allow. There’s still a lot of research and development required, but this sure does look promising.
Tony Murfin
GNSS Aerospace
References
“Future Automotive GNSS Positioning in Urban Scenarios,” Martin Escher, Mirko Stanisak, Ulf Bestmann, ION GNSS+ 2015.
“Indoor Flight Demonstration Results of an Autonomous Multi-copter using Multiple Laser Inertial Navigation,” Adam Schultz, Russell Gilabert, and Maarten Uijt de Haag, ION GNSS+ 2015.