No audio available for this content.
There are many ways to navigate. For most applications, none surpass the accuracy, affordability and convenience of satellite navigation.
However, given the threats to GNSS from spoofing and jamming, and the possibility that GNSS satellites could be destroyed accidentally by space debris or intentionally during a war, the search is on for alternative sources of positioning, navigation and timing (PNT) data.
Potential alternative PNT (APNT) approaches include computer vision, terrain contour matching (TERCOM, which was used to guide cruise missiles in the 1970s and 1980s), and using magnetic anomalies (MAGNAV).
Diverse animals — such as sea turtles, spiny lobsters, and birds — use magnetoreception for orientation and navigation. However, while animals likely perform wayfinding using the direction of the magnetic field, similarly to how humans use a compass, high-resolution maps used in conjunction with atomic instruments enable us to perform absolute positioning to tens of meters, explained Major Aaron Canciani.
Canciani, an assistant professor of electrical engineering at the Air Force Institute of Technology, has been designing algorithms for MAGNAV flight testing for several years.
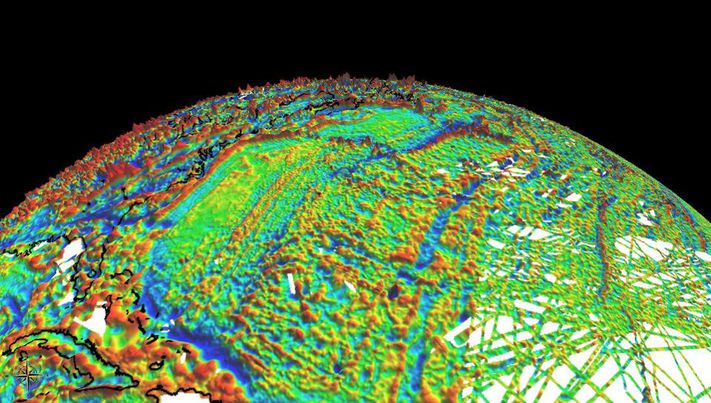
Earth’s crustal magnetic field varies from location to location as much as topographic features do and, like them, it changes very little over time. However, unlike topographic features, which only occur on the third of the planet’s surface covered by land, magnetic variations also occur on the oceans. This makes them potentially very useful as landmarks to the Navy and Air Force. Magnetic variations have the additional benefit that they cannot be jammed or spoofed.

Just like other features of Earth, magnetic fields can be mapped, using scalar magnetometer sensors to measure their strength and direction. In fact, government agencies and mining companies have been making these maps for many decades, for geological exploration and other purposes, though mostly on land.
Conversely, these maps can be used to navigate by comparing the data from magnetometers to the map, just like cruise missiles used to use on-board radar altimeters to match the contours of the land beneath them to contour lines on a digital map and navigators on vessels in shallow waters compare the depths reported by their fathometers to those marked on a chart.
Before this approach to navigation can be widely implemented, however, magnetic maps need to greatly improve in coverage and quality. In addition to magnetic maps and sensors, MAGNAV also requires sophisticated algorithms and careful calibration, to do such things as subtract errors from space weather and the local magnetic field of the aircraft or ship.
The greater the platform’s speed, the greater MAGNAV’s accuracy, because the magnetometers can collect more varying magnetic information per unit of time of INS drift, Canciani explains. On a platform moving fast and at low altitudes, MAGNAV could achieve 10-meter accuracy. In less ideal conditions and relying on lower quality magnetic maps, the accuracy could be as low as one kilometer — which is sufficient for many missions, such as navigating ships at sea.
Off-the-shelf scalar magnetometers about the size of a quarter have already been flight tested. Corporations, the military and civilian government agencies such as NOAA, NASA and NGA already have suitable magnetic maps, though they need to be improved and expanded, particularly at sea. This would require gathering new data using calibrated sensors on airplanes, ships and submarines.
Could magnetic sensors be installed on thousands of aircraft, land vehicles and sea vessels to collect magnetic data during their routine operations? “With proper calibration, yes, but it should not be downplayed how difficult it is to get 1 nanoTesla measurements on a platform,” Canciani said. “Mapping and navigation are inverse problems so any platform that has been calibrated well enough to navigate could, in turn, also be used for mapping.”
However, he points out, the task is much more complicated than just putting a magnetometer on a platform. “Getting clean data on complex platforms remains the largest challenge for magnetic navigation,” Canciani said, “although we are making excellent progress with projects like the Air Force Accelerated AI program with MIT and Lincoln Lab. In this project we are using state of the art scientific machine learning approaches to calibrate complex magnetic fields on operational platforms. Without excellent calibration algorithms the only sure-fire way to get clean magnetic data is putting a sensor out on a boom or wing-tip, which might not be practical for all use cases.”

Canciani admits that MAGNAV is often met with skepticism but hopes that realistic testing on realistic platforms will lead to more interest and funding for this approach.
While some such testing has already been performed using private survey aircraft, a much more important test will take place in September, when F-16s from the Air Force Test Pilots School will fly MAGNAV sensors and software over a test range next to Edwards Air Force Base in Nevada.















