No audio available for this content.
Oxford Technical Solutions has released the xNAV650, the latest in its line of inertial navigation systems (INS), suitable for use on drones.
INS provide surveyors with absolute position, timing and inertial measurements (heading and pitch/roll) that they can integrate into their survey projects. The measurements, when combined with data from other devices (such as lidar sensors and cameras), can greatly enhance the surveying process, leading to a greater return on investment, according to the company.
The xNAV650 is OxTS’ smallest, lightest and most affordable INS to date. It combines 20 years of navigation experience with the latest micro-electromechanical (MEMS) inertial measurement unit (IMU) technology and survey-grade GNSS receivers.
UAV Guidance
The xNAV650 provides highly accurate and reliable measurements – even when payload size and weight are imperative to consider, including for use with unmanned aerial vehicles (UAVs). It measures 77 x 63 x 24 mm and weighs 130 grams.
The xNAV650 INS is suitable for a wide range of UAV data-collection applications, including surveys of bridges, buildings, forests and rail; coastal monitoring; map creation and pipeline exploration.
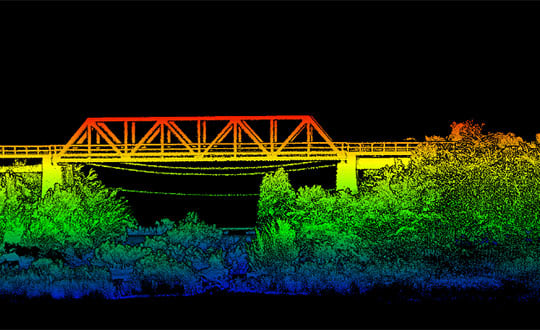
OxTS’ partner Dronezone used the xNAV650 INS and a Velodyne VLP-16 lidar on a drone to conduct a scan of an aging bridge to look for structural and potential hazards from overgrown foliage.
By fusing the timing, position and inertial data from the INS with the raw data of the Velodyne VLP-16 (using OxTS’ lidar georeferencing software OxTS Georeferencer), the surveyor was able to produce a highly accurate 3D point cloud of the bridge. Fusing the position and inertial data from the xNAV650 INS with the Velodyne VLP-16 lidar data provides a high level of clarit, which can be seen in the foliage, electricity lines and side of the bridge.
The resulting point cloud has enabled the engineers to easily and accurately pinpoint areas of the bridge that need closer attention.
NAVsuite Software
Data from OxTS INS can be fused with the data from almost any lidar sensor. Using OxTS Georeferencer software, point clouds can be georeferences from lidar units specifically from Velodyne, Hesai and Ouster sensors. Work is underway to integrate new lidar sensors from an even wider range of manufacturers into OxTS Georeferencer – allowing OxTS INS users to build a full navigation solution where much of the integration work is already taken care of.
OxTS NAVsuite software is included with all OxTS INS. The full range of software tools allows users of OxTS’ devices to configure and post-process data with ease.
Other optional software features are also available, including Precision Time Protocol (PTP) and GX/IX tight-coupling technology. PTP allows for a much simpler lidar survey set-up over ethernet while simultaneously stamping out time-drift by utilizing the high-quality INS clock source – GNSS. GX/IX tight-coupling technology, OxTS’ own proprietary navigation engine, ensures that users of OxTS Inertial Navigation Systems receive the most accurate measurements possible even in tough GNSS conditions.














