No audio available for this content.
Two are better than one
Multi-GNSS will open up PPP to a much wider range of applications.
By Francesco Basile, Terry Moore, Chris Hill, Gary McGraw and Andrew Johnson

ARE WE THERE? In a multi-GNSS world, that is. We’ve asked that question from time to time in this column over the years. So, are we there yet? That depends. One definition of “multi” is more than one. In this sense, we were in a multi-GNSS world as long ago as 1996. In that year, we had two fully populated constellations of satellites: GPS and GLONASS. Unfortunately, the full GLONASS constellation was short-lived. Russia’s economic difficulties following the dissolution of the Soviet Union hurt GLONASS, and by 2002 the constellation had dropped to as few as seven satellites. But GLONASS was reborn, and by Dec. 8, 2011, a full 24-satellite constellation was again operational.
But another meaning of “multi” is many, implying more than two. In the late 1990s, the first satellites to host transponders for satellite-based augmentation systems were launched. So, by the mid-2000s, even though GLONASS was still undergoing its rejuvenation, we were already in a three-constellation world. And receivers then on the market provided the necessary raw measurement data to yield positioning solutions from this system of systems with potentially more continuity and greater accuracy than those obtained using GPS alone.
And so in July 2008, we featured the article “The Future is Now: GPS + GLONASS + SBAS = GNSS.” And then in June 2010, we had “GPS, GLONASS, and More: Multiple Constellation Processing in the International GNSS Service.” In the introduction to that article, we asked that same question: Are we there yet? We concluded that, for early adopters of GPS plus GLONASS data and products, we were. With Galileo test satellites in orbit and an early version of the BeiDou system operational, it was already clear that by the end of the current decade, it wouldn’t just be the early adopters who would be benefiting from multi-GNSS but virtually all users of satellite-based positioning and navigation.
Although we aren’t quite there with fully operational Galileo and BeiDou constellations, we are getting pretty close. And so researchers are looking hard at how to make the best use of multiple-constellation observations in a variety of positioning and navigation scenarios. In this month’s column, a team of such researchers examines the potential benefit of combining GPS and Galileo observations for improving precise point positioning in urban environments, following the advice we read in the Book of Ecclesiastes: “Two are better than one.”
Over the years, precise point positioning (PPP) has been applied to many real-time applications that require sub-decimeter-level accuracy over a wide area or on a global scale. It is currently a standard in scenarios characterized by open-sky conditions, where a receiver is likely to have continuous track of GNSS satellites. On the other hand, PPP’s typically long convergence time means the technique has not been widely used in constrained and transient signal environments associated with urban areas. Analysis with both simulated and real data has shown that, once Galileo reaches final operational status, the PPP convergence time will be cut by more than half when using both GPS and Galileo observations. Accordingly, multi-GNSS will open up PPP to a much wider range of applications.
To begin, we assessed the positioning performance of GPS and Galileo signals, alone or used together, in open-sky conditions. A Simulink-based software simulator was used to simulate 24-hour-long observation sessions from 10 static (fixed location) receivers spread worldwide, which were then processed with the POINT software (developed by the University of Nottingham and three other British universities) in static (receiver assumed fixed) PPP mode with an elevation cutoff angle of 10° and with carrier-phase ambiguities estimated as real or floating-point values. For each station, the simulator was run 55 times to provide a sufficient number of data points to characterize the general behavior of the processing algorithms; therefore, a total of 550 points were considered.
For better GPS-Galileo interoperability, PPP results based on the ionosphere-free (IF) combination between GPS L1 and L5 and Galileo E1 and E5a observables were considered.
The metrics used to define the positioning performance are the errors in the north, east and down components of the position once all of a daily file has been processed and the time these errors take to converge below 10 centimeters.
The open-sky condition always guarantees excellent geometry and signal continuity even considering only one constellation.
PPP Results. TABLE 1 shows the root mean square (RMS) of the errors and convergence times of the three components of position for the different configurations for the 550 points considered. Both single- and dual-constellation systems are able to provide a sub-decimeter-level accuracy after a few tens of minutes. On average, positioning with Galileo E1-E5a IF performs better that GPS L1-L5 IF: the Galileo solution is more accurate and converges faster than the GPS solution.

The reason for this behavior is the assumed lower noise on Galileo pseudoranges. It is well known that the quality of the pseudoranges affects the convergence time of the PPP solution.
For this reason, one would expect some improvements by employing the Galileo Alternative BOC (AltBOC) modulated E5 signal. Thanks to its very large signal bandwidth of at least 51 MHz, Galileo E5 is characterized by excellent rejection properties of both long-range and short-range multipath. However, as shown in Table 1, when comparing the PPP solutions obtained using the Galileo E1-E5 IF and E1-E5a IF combinations, they have nearly the same performance. The reason for this apparent contradiction can be found in the use of the IF combination with E1. Given that E1 represents the dominant source of error in the IF combinations, its noise is amplified by a factor of 2.34 in the IF combination with E5 and by a factor of 2.26 when combined with E5a. Also, the smaller errors (with respect to E1) in E5a are amplified by 1.26, while the one in E5 is amplified by 1.34. Therefore, depending on the noise level in the Galileo pseudoranges, there might be instances where the noise in the E1-E5 IF combination is close to the one in the E1-E5a IF combination.
The number and the geometry of the observed satellites also affect the convergence time. For this reason, when using the two systems together, the time the vertical errors take to go below 10 centimeters was reduced by 50 percent with respect to the GPS-only case and by 18 percent with respect to the Galileo-only case.
URBAN ENVIRONMENTS
The poor signal visibility and continuity associated with urban environments, together with the slow (re)convergence time of PPP, usually make the technique unsuitable for land navigation in cities. However, as demonstrated in the previous section, using a dual-constellation not only improves the visibility conditions, but also reduces the PPP convergence time. Therefore, it might be possible to extend the applicability of PPP to land navigation in certain urban areas.
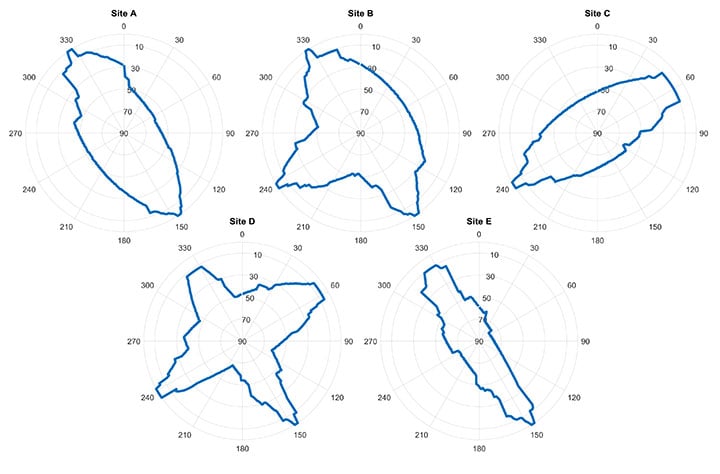
To assess the positioning performance of two-constellation GNSS in these constrained environments, we analyzed the signal availability and geometry of five different simulated sites in the neighborhood of the University College London (UCL) campus. We adopted building boundaries, which determine the minimum elevation angles above which GNSS signals can be received due to building obstruction. FIGURES 1 and 2 illustrate the location and the building boundaries for each site. FIGURE 3 shows the junction (site B) between Gower Street (site A) and University Street (site C).


When processing data from multi-constellation GNSS, the differences between the system time of the different constellations need to be considered. For this reason, when GPS and Galileo are used simultaneously for precise positioning, the Kalman filter state vector (in general) includes the three position components, the receiver clock offset, and the GPS-Galileo Time Offset (GGTO) — whether or not a predicted value might be available in a navigation message from one of the constellations. On the other hand, in PPP processing, the multi-constellation precise products used are based on the same system time, and therefore, in theory, it is not necessary to estimate the GGTO. However, existing intersystem biases may affect the PPP performance, and so it is advisable to estimate them in the Kalman filter.
Traditionally in PPP, the state vector also includes the residual zenith wet tropospheric delay and the carrier-phase ambiguities. Therefore, the minimum number of satellites required for GPS plus Galileo PPP is six. The geometry conditions are also an important factor for assessing the GNSS positioning performance. For land navigation, the horizontal dilution of precision (HDOP), which provides information about the achievable horizontal precision (and, assuming a bias-free solution, accuracy), is particularly relevant. For many land applications, such as precision agriculture and urban positioning, horizontal accuracy is more critical than vertical accuracy. Assuming that the ranging error in the carrier phase is 20 centimeters, to have decimeter-level horizontal accuracy HDOP needs to be no larger than 5. In most cases, HDOP values as small as 2 are desired.
TABLE 2 gives an overview of the visibility and geometry conditions at the selected sites. A dual-constellation (GPS and Galileo) receiver placed at one of the two road junctions will always, or almost always, see at least six satellites with an HDOP better than 5. At sites A and C, these minimum requirements for signal availability and geometry are met for more than 75 percent of the day. Obstructions due to high buildings, such as at site E, allows us to have at least six satellites for only 13 percent of the time.

From our preliminary study, it seems clear that high-accuracy positioning in urban environments is possible, but only in some areas where buildings are relatively short, providing good signal availability and geometry. Things can slightly improve by considering additional systems, such as GLONASS and BeiDou, and by exploiting the non-line-of-sight (reflected) signals. However, it is well known that an additional obstacle for PPP in urban environments is signal discontinuity. Indeed, when a GNSS receiver loses lock on the carrier, the positioning filter needs to be reinitialized, meaning that further tens of minutes are required before reconvergence.
To test the reconvergence time of PPP in transient signal environments, a pedestrian carrying a multi-GNSS receiver was simulated to be walking along the path in FIGURE 4. The receiver was simulated to be located for the first half hour of the simulation in the front yard of UCL’s Wilkins Building (where the simulation begins and ends), before starting to move. This is to allow the initial convergence of the PPP filter.

FIGURE 5 shows the visibility for a given GNSS satellite. Only the epochs when the receiver is moving are considered. Therefore, the first 30 minutes, when the receiver is static, are not included in the plot. Data gaps due to building obstructions are visible, with the largest being about 12 minutes and the average less than 2 minutes. As a consequence, the carrier-phase ambiguities need to be estimated all over again; and, as previously mentioned, this process usually requires tens of minutes before reconvergence.
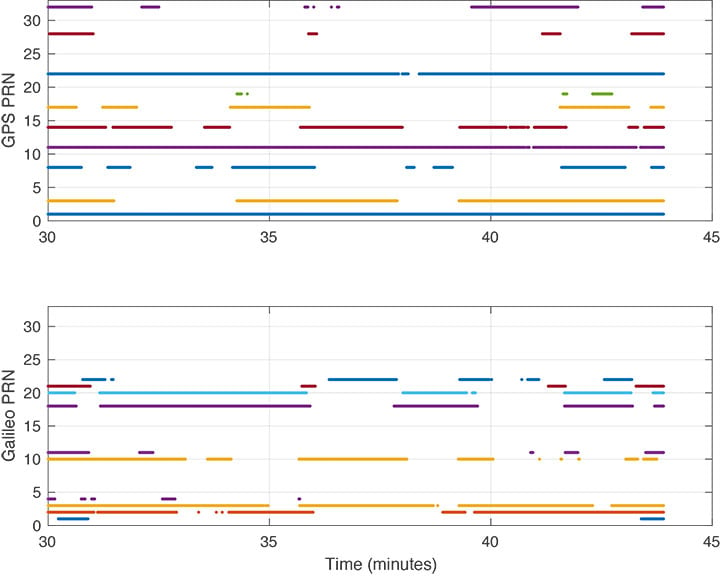
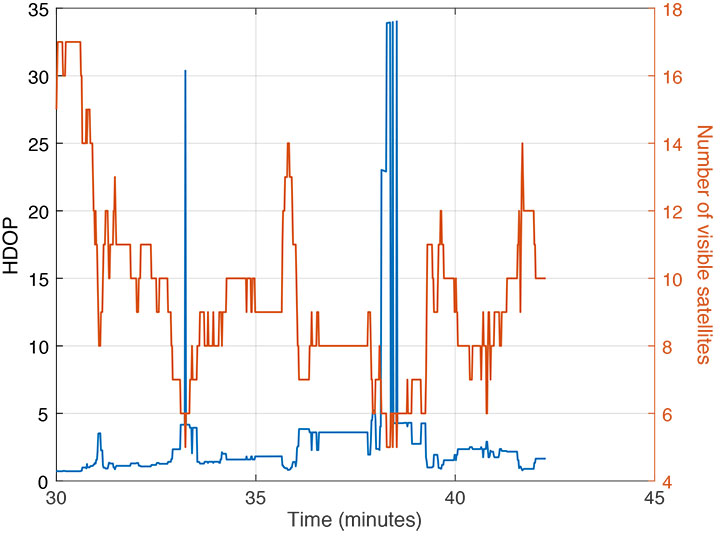
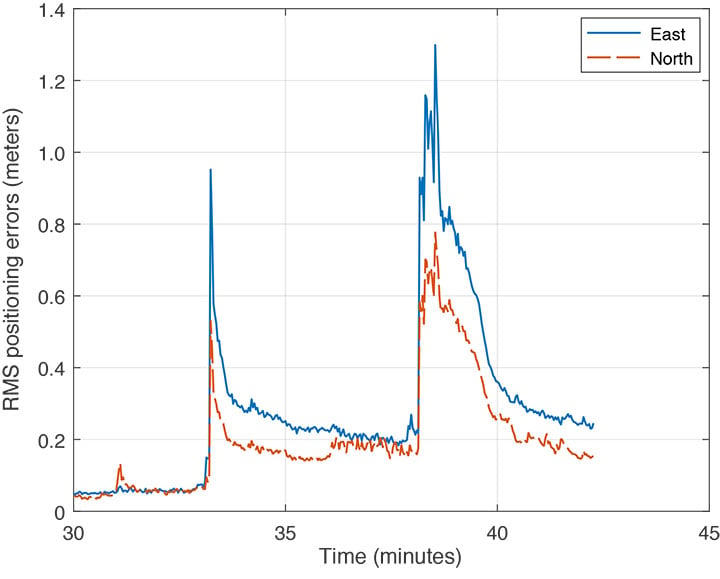
FIGURE 6 shows the HDOP and the number of visible satellites for the kinematic test, while FIGURE 7 shows the RMS, over 50 simulations, of the horizontal components of the positioning error when GPS L1 and L2 and Galileo E1 and E5, linearly combined into the IF combination, are processed in kinematic PPP mode with the POINT software. At the beginning of the kinematic test, when the HDOP is well below 5, the horizontal error is at the centimeter level, while, after 33 minutes from the beginning of the simulation, building obstructions don’t permit a converged solution below the 20-centimeter accuracy level.
This short example clearly demonstrates that two-constellation PPP has, in theory, the potential to precisely navigate ground vehicles in some urban environments; however, it is too sensitive to signal discontinuity. Slow solution reconvergence to the few decimeter/centimeter level still represents the main limitation to the use of PPP for high-accuracy applications in cities. Nonetheless, GPS plus Galileo PPP easily enables sub-meter-level horizontal accuracy for most of the simulations we have carried out. After signal loss, it only took a few tens of seconds to have a horizontal accuracy of better than a meter.
SMOOTHED CORRECTIONS
As an alternative to ambiguity-fixing methods aimed to improve the (re)convergence time, we propose a method that mitigates the effect of the ionosphere and which thereby reduces the reconvergence time of the PPP solution after initial convergence has been achieved. In this new approach, while the two-frequency carrier phases are linearly combined in the traditional IF combination, the uncombined pseudoranges are corrected by a pre-smoothed ionospheric delay (via a Hatch filter), computed using the geometry-free combination of two-frequency pseudoranges.
Once the Hatch filter has converged, ideally we have IF pseudoranges with lower noise than the traditional ones. Therefore, in case the PPP filter needs to restart, we can obtain a quicker reconvergence thanks to the lower noise on the ionosphere-corrected pseudoranges. Indeed, provided that the signal gap is not very large, the ionosphere smoothing filter doesn’t need to be restarted from the raw values.
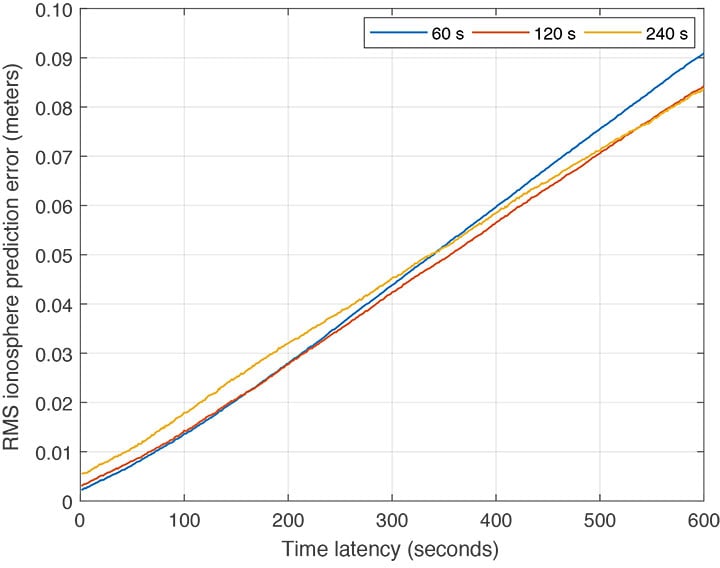
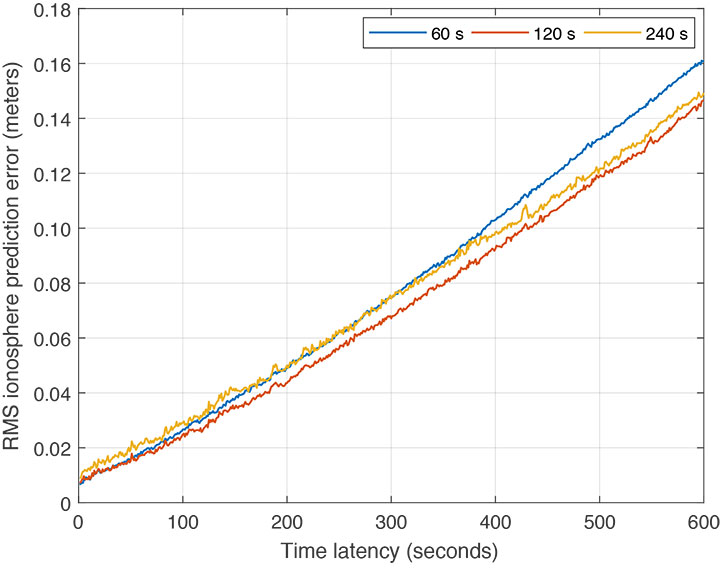
It is possible to predict the ionospheric delay computed from two-frequency carrier-phase measurements using a linear fitting model from previous measurements within a sliding time window. As an example, high-rate data recorded on July 25, 2017, from station DAEJ in Daejeon, Republic of Korea, were used to analyze the ionosphere prediction error.
In FIGURES 8 and 9, the RMS of the prediction errors for different time windows have been plotted against the data gap length. The prediction error depends on both the time latency of the observation and the elevation angle of the satellite. It increases with the data gap length, but larger time windows can damp the divergence of the error. A time window of 120 seconds was used both for satellites above and below 30° elevation angle. In this case, the error for a 5-minute prediction is about 4 centimeters for a satellite above 30° and 7 centimeters for satellites with a low elevation angle. These values are much smaller than the noise in the pseudorange measurements and can, therefore, be neglected.
Multi-Frequency Combinations. The method introduced in the previous section allows users to be free from the constraint of IF observables and, therefore, to look for multi-frequency combinations aimed to minimize the noise on the pseudoranges. The next-generation GNSS satellites will broadcast open signals over three frequencies. The triple-frequency, geometry-preserving combination aimed to reduce the noise, instead of mitigating the ionosphere, can be used for positioning purposes.
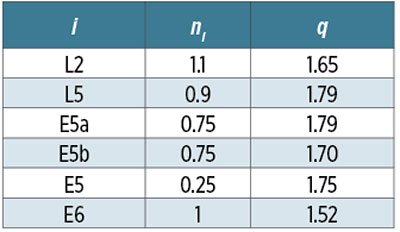
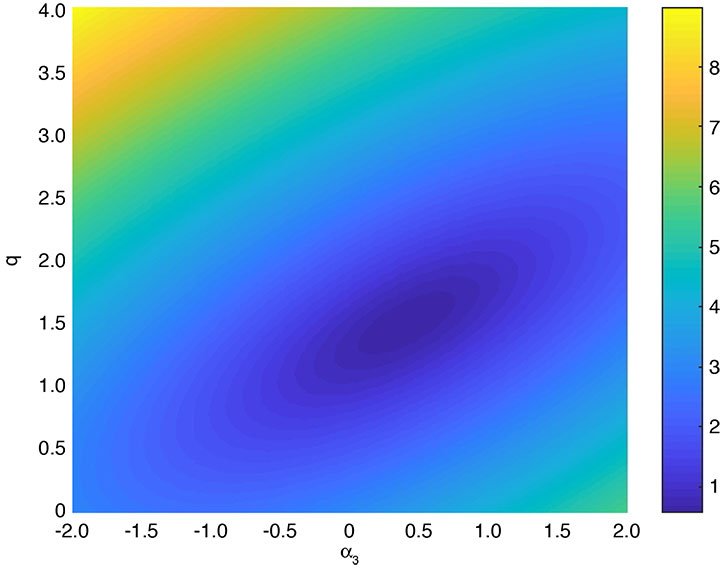
TABLE 3 summarizes the assumed values for the ratios ni between the noise on different GPS and Galileo pseudoranges and the ones on L1/ E1. FIGURE 10 shows a color map of the noise amplification factor associated with different linear combinations between GPS L1, L2 and L5. The x-axis is α3, the coefficient multiplying the pseudorange on L5 in the combination, while the y-axis is the ionosphere amplification factor of the triple-frequency combination with respect to L1, q. The noise for this combination can be as little as 0.57 times the noise on L1, while the corresponding ionosphere amplification factor is 1.49. Once the smoothed ionosphere correction has converged, we can potentially have an IF pseudorange 81 percent less noisy than the L1-L2 IF, and, therefore, a much faster reconvergence.
Similar conclusions can be drawn by considering Galileo signals. Using triple-frequency combinations with E1, E5a and E5b, we can obtain 81 percent less noise than E1-E5a IF, while a reduction of the noise in the IF pseudorange up to 90 percent was observed using E5 alone. Triple-frequency combinations involving E5 don’t bring such large improvements with respect to using E5 alone. Indeed, a maximum of 16 percent less noise can be registered when combining E1, E5a and E5 with respect to the E5 uncombined case. TABLE 4 illustrates the minimum noise amplification factor for each triple-frequency combination and its ionosphere amplification factor.

The noise associated with the ionosphere-corrected multi-frequency pseudorange combination is as large as meter level before converging to centimeter level. For this reason, a proper weighting method, which considers the varying noise on the ionosphere correction, needs to be employed.
To test the benefit of the new approach for the reconvergence time, three hours of simulated GPS and Galileo data from a static site in La Misere, Seychelles, were processed with the POINT software in kinematic mode. After 90 minutes, the PPP filter was forced to restart to simulate reconvergence. The multipath time constant was set to 5 seconds, which is a typical value for kinematic multipath. The performance of the traditional L1- L2 IF combination was compared with the triple-frequency pseudorange combination, corrected by the smoothed ionosphere delay coming from the Hatch filter.
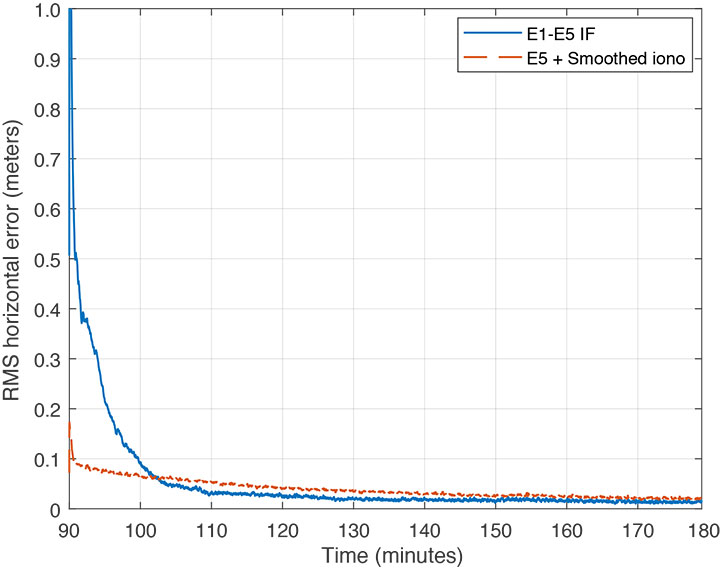
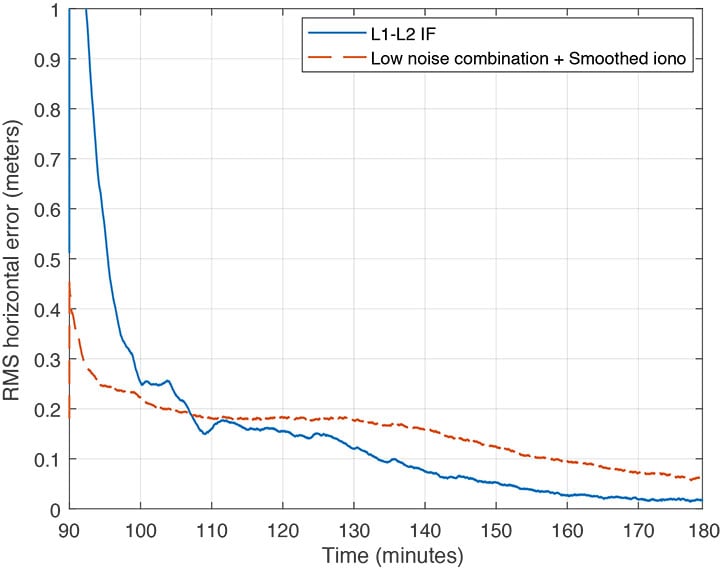
FIGURE 11 shows the precision (RMS error over 50 simulations) of the horizontal components after filter restart. The new approach has much faster reconvergence than the traditional PPP method based on the IF combination. Indeed, while the traditional method takes about 11 minutes to have a horizontal error below 10 centimeters, using the low-noise combination, this accuracy is achieved after 171 seconds. Even better performance can be achieved considering the Galileo E5 signal (see FIGURE 12).

The E1-E5 IF combination requires 10 minutes for the horizontal convergence, while using E5 with the Hatch filter we have the horizontal solution converged in about 30 seconds. It is worth noticing that in the presence of static multipath, the proposed weighting method may lead to an overly optimistic weighting of the pseudorange measurements in the PPP filter and to a slower reconvergence of the positioning solution. Indeed, the long correlation time in the static multipath, of the order of a few minutes, makes it hard to filter out by the Hatch filter, hence the corrected measurements have larger errors than expected.
The effect of static multipath in the new configuration is visible in FIGURE 13, where the reconvergence of the horizontal component for the L1-L2 IF combination is compared with the new approach. In this case, the time constant of the simulated multipath was set to 1 minute. In this scenario, the triple-frequency low-noise combination corrected by the smoothed ionosphere combination quickly converges below 20 centimeters; however, it takes significantly longer than the L1-L2 IF combination to reach the 10-centimeter accuracy level.
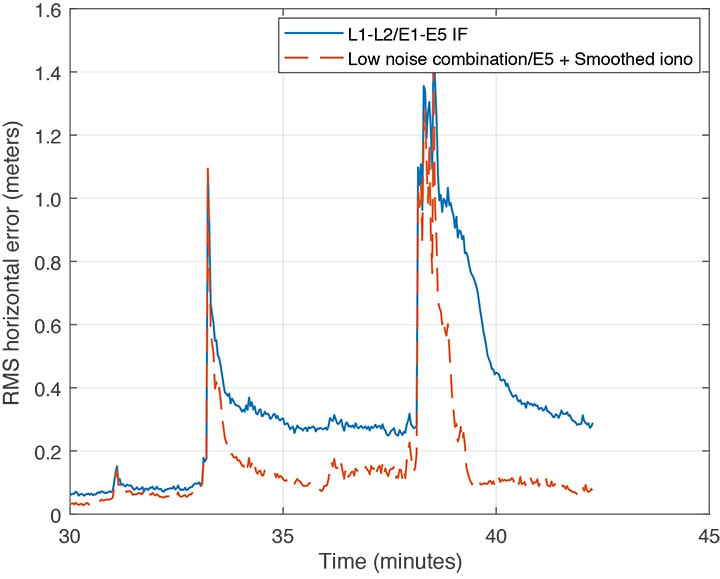
Also, the new method was tested with the kinematic simulation as in the previous section. Here, the GPS triple-frequency combined pseudorange and Galileo E5 pseudorange (both corrected with the smoothed ionosphere) are processed in kinematic PPP mode with the POINT software. FIGURE 14 compares the RMS of the horizontal errors with the IF configuration. Less than a minute after the receiver lost lock on the satellites, the solution reconverged below the 20-centimeter level, while it took less than 30 seconds to go below 50 centimeters.
CONCLUSIONS
In this article, we described a comparison that we carried out between GPS-only, Galileo-only and GPS plus Galileo PPP. Results based on simulated open-sky conditions demonstrated that Galileo performs better than GPS thanks to an assumed lower E1-E5a IF noise with respect to L1-L5. Two-constellation PPP enables faster (re)convergence compared to the single constellation case.
An analysis of GNSS signal availability, continuity and satellite geometry was also performed to study the feasibility of PPP in urban environments. Preliminary results, based on simulations, showed that dual-constellation (GPS plus Galileo) PPP is possible in urban areas with relatively short buildings in which a satellite minimum availability requirement is met most of the time. However, signal discontinuity still represents the major problem for traditional PPP in urban environments, due to long reconvergence times.
Finally, we proposed a new PPP configuration based on triple-frequency combinations, intended to minimize the noise on the pseudorange and corrected by a smoothed ionospheric delay. This configuration seems to provide faster reconvergence than the traditional PPP with the IF combination if applied to kinematic scenarios. In static applications, the very slow varying multipath error makes the proposed weighting method, based on the error in the smoothed ionosphere correction, overly optimistic. In such cases, the IF combination reconverges more quickly to high-accuracy levels better than 20 centimeters.
ACKNOWLEDGMENTS
The research described in this article was sponsored through a studentship agreement between the University of Nottingham and Rockwell Collins UK Limited. The article is based on the paper “Multi-Frequency Precise Point Positioning Using GPS and Galileo Data with Smoothed Ionospheric Corrections” presented at the 2018 IEEE/ION Position, Location and Navigation Symposium, held in Monterey, California, April 23–26, 2018. All figures attributed to the authors unless otherwise specified.
MANUFACTURERS
The receiver at station DAEJ is a Trimble NetR9.
FRANCESCO BASILE is a postgraduate research student at the Nottingham Geospatial Institute of the University of Nottingham in the United Kingdom. He received his M.Sc. in space and astronautic engineering from the University of Rome – La Sapienza and his B.Sc. in aerospace engineering from the University of Naples – Federico II, both in Italy.
TERRY MOORE is the director of the Nottingham Geospatial Institute where he is the Professor of Satellite Navigation. He is a fellow and the president of the Royal Institute of Navigation (RIN) and also a fellow and a member of council of the Institute of Navigation (ION).
CHRIS HILL is an associate professor in the Faculty of Engineering at the University of Nottingham and a member of the Nottingham Geospatial Institute research group. He holds a Ph.D. in satellite laser ranging and he is a fellow of the RIN.
GARY MCGRAW is a technical fellow with the Rockwell Collins Advanced Technology Center in Cedar Rapids, Iowa. McGraw is a fellow of the ION and is a senior member of the IEEE.
ANDREW JOHNSON is a chief engineer at Rockwell Collions UK in Winnersh, Berkshire, United Kingdom. Johnson has a B.Sc. in electronic and electrical engineering from the University of Surrey in Guildford, United Kingdom.
FURTHER READING
- Authors’ Conference Paper
“Multi-Frequency Precise Point Positioning Using GPS and Galileo Data with Smoothed Ionospheric Corrections” by F. Basile, T. Moore, C. Hill, G. McGraw and A. Johnson in Proceedings of PLANS 2018, the Institute of Electrical and Electronics Engineers / Institute of Navigation Position, Location and Navigation Symposium, Monterey, California, April 23–26, 2018, pp. 1388–1398, doi: 10.1109/PLANS.2018.8373531.
- Multi-Constellation Use in Built-up Areas
“Making It Better: Low-Cost Single-Frequency Positioning in Urban Environments” by I. Smolyakov and R.B. Langley in GPS World, Vol. 29, No. 5, May 2018, pp. 42–48.
“Quo Vademus: Future Automotive GNSS Positioning in Urban Scenarios” by M. Escher, M. Stanisak and U. Bestmann in GPS World, Vol. 27, No. 5, May 2016, pp. 46–52.
“Multi-Constellation GNSS Performance Evaluation for Urban Canyons Using Large Virtual Reality City Models” by L. Wang, P.D. Groves and M.K. Ziebart in Journal of Navigation, Vol. 65, No. 3, July 2012, pp. 459–476, doi: 10.1017/S0373463312000082.
“Potential Benefits of GPS/GLONASS/GALILEO Integration in an Urban Canyon – Hong Kong” by S. Ji, W. Chen, X. Ding, Y. Chen, C. Zhao and C. Hu in Journal of Navigation, Vol. 63, No. 4, October 2010, pp. 681–693, doi: 10.1017/S0373463310000081.
- Multi-Constellation Use in Aviation Applications
“Assessment of Alternative Positioning Solution Architectures for Dual Frequency Multi-Constellation GNSS/SBAS” by G. McGraw, B.A. Schnaufer, P.Y. Hwang and M.J. Armatys in Proceedings of ION GNSS+ 2013, the 26th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, Tennessee, Sept. 16–20, 2013, pp. 223–232.
- Advances in Precise Point Positioning
“More Is Better: Instantaneous Centimeter-Level Multi-Frequency Precise Point Positioning” by D. Laurichesse and S. Banville in GPS World, Vol. 29, No. 7, July 2018, pp. 42–47.
“Where Are We Now, and Where Are We Going?: Examining Precise Point Positioning Now and in the Future” by S. Bisnath, J. Aggrey, G. Seepersad and M. Gill in GPS World, Vol. 29, No. 3, March 2018, pp. 41–48.
“Undifferenced GPS Ambiguity Resolution Using the Decoupled Clock Model and Ambiguity Datum Fixing” by P. Collins, S. Bisnath, F. Lahaye, and P. Héroux in Navigation, Vol. 57, No. 2, Summer 2010, pp. 123–135, doi: 10.1002/j.2161-4296.2010.tb01772.x.
“Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination” by D. Laurichesse, F. Mercier, J.-P. Berthias, P. Broca and L. Cerri in Navigation, Vol. 56, No. 2, Summer 2009, pp. 135–149, doi: 10.1002/j.2161-4296.2009.tb01750.x.
- Hatch Filter
“Combinations of Observations” by A. Hauschild, Chapter 20 in Springer Handbook of Global Navigation Satellite Systems, edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
“The Synergism of GPS Code and Carrier Measurements” by R. Hatch in Proceedings of the Third International Geodetic Symposium on Satellite Doppler Positioning, Las Cruces, New Mexico, Feb. 8–12, 1982, Vol. II, pp. 1213–1232.
- Dilution of Precision
“Dilution of Precision” by R.B. Langley in GPS World, Vol. 10, No. 5, May 1999, pp. 52–59.
- Kalman Filtering
“Least-Squares Estimation and Kalman Filtering” by S. Verhagen and P.J.G. Teunissen, Chapter 22 in Springer Handbook of Global Navigation Satellite Systems, edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
“The Kalman Filter: Navigation’s Integration Workhorse” by L.J. Levy in GPS World, Vol., No., September 1997, pp. 65–71.















