No audio available for this content.
Where Are We Now, and Where Are We Going?
In this month’s column, we travel along the road of PPP development, examine its current status and look at where it might go in the near future
By Sunil Bisnath, John Aggrey, Garrett Seepersad and Maninder Gill

PPP. It’s one of the many acronyms (or initialisms, if you prefer) associated with the uses of global navigation satellite systems. It stands for precise point positioning. But what is that? Isn’t all GNSS positioning precise? Well, it’s a matter of degree.
Take GPS, for example. The most common kind of GPS signal use, that implemented in vehicle “satnav” units; mobile phones; and hiking, golfing and fitness receivers, is to employ the L1 C/A-code pseudorange (code) measurements along with the broadcast satellite orbit and clock information to produce a point position.
Officially, this is termed use of the GPS Standard Positioning Service (SPS). It is capable of meter-level positioning accuracy under the best conditions. There is a second official service based on L1 and L2 P-code measurements and broadcast data called the Precise Positioning Service (PPS).
In principle, because the P-code provides somewhat higher precision code measurements and the use of dual-frequency data removes virtually all of the ionospheric effect, PPS is capable of slightly more precise (and accurate) positioning. But because the P-code is encrypted, PPS is only available to so-called authorized users.
While meter-level positioning accuracy is sufficient for many, if not most applications, there are many uses of GNSS such as machine control, surveying and various scientific tasks, where accuracies better than 10 centimeters or even 1 centimeter are needed. Positioning accuracies at this level can’t be provided by pseudoranges alone and the use of carrier-phase measurements is required. Phase measurements are much more precise than code measurements although they are ambiguous and this ambiguity must be estimated and possibly resolved to the correct integer value.
Traditionally, phase measurements (typically dual-frequency) made by a potentially moving user receiver have been combined with those from a reference receiver at a well-known position to produce very precise (and accurate) positions. If done in real time (through use of a radio link of some kind), this technique is referred to as real-time kinematic or RTK.
A disadvantage of RTK positioning is that it requires reference station infrastructure including a radio link (such as mobile phone communications) for real-time results. Is there another way? Yes, and that’s PPP. PPP uses the more precise phase measurements (along with code measurements initially) on at least two carrier frequencies (typically) from the user’s receiver along with precise satellite orbit and clock data derived, by a supplier, from a global network. Precision, in this case, means a horizontal position accuracy of 10 centimeters or better.
In this month’s column, we travel along the road of PPP development, examine its current status, and look at where it might go in the near future.
In a 2009 GPS World “Innovation” article co-authored by Sunil Bisnath, the performance and technical limitations at the time of the precise point positioning (PPP) GPS measurement processing technique were described and a set of questions asked about the potential of PPP, especially with regard to the real-time kinematic (RTK) measurement processing technique.
Since the 2009 article, we’ve seen a significant amount of research and development (R&D) activity in this area. Many scientific papers discuss PPP and making use of PPP — a search on Google Scholar for “GNSS PPP” delivers nearly 7,000 results, and for “GPS PPP” more than 15,000 results! Will PPP eventually overtake RTK as the de facto standard for precise (that is, few centimeter-level) positioning? Or, in light of PPP R&D developments, should we be asking different questions, such as will multiple precise GNSS positioning techniques compete or complement each other or perhaps result in a hybrid approach?
In almost a decade, have we seen much in the way of positioning performance improvement, where “performance” can refer to positioning precision, accuracy, availability and integrity? Or, to some users, has the Achilles’ heel of PPP — the initial position solution convergence period — only been reduced from, for example, 20 minutes to 19 minutes? From such a perspective, all of this PPP research might not appear to have produced much tangible benefit. Advances have been made from this research and we will explore them here. Also, aside from many researchers working diligently on their own PPP software, there are now a number of well-established PPP-based commercial services — a number that has grown and been affected by the wave of GNSS industry consolidation over the decade. Consequently, there is much more to this story.
This month’s article summarizes the current status of PPP performance and R&D, and discusses the potential future of the technique. In the first part of the article, we will present brief explanations of conventional dual-frequency PPP, recent research and implementations, and application of the evolved technique to low-cost hardware. We will conclude the article with a rather dangerous attempt at near-term extrapolation of potential upcoming developments and conceivable implications.
Conventional PPP
The concept of PPP is based on standard, single-receiver, single-frequency point positioning using pseudorange (code) measurements, but with the meter-level satellite broadcast orbit and clock information replaced with centimeter-level precise orbit and clock information, along with additional error modeling and (typically) dual-frequency code and phase measurement filtering. Back in 1995, researchers at Natural Resources Canada were able to reduce GPS horizontal positioning error from tens of meters to the few-meter level with code measurements and precise orbits and clocks in the presence of Selective Availability (SA). Subsequently, the Jet Propulsion Laboratory introduced PPP as a method to greatly reduce GPS measurement processing time for large static networks. When SA was turned off in May 2000 and GPS satellite clock estimates could then be more readily interpolated, the PPP technique became scientifically and commercially popular for certain precise applications.
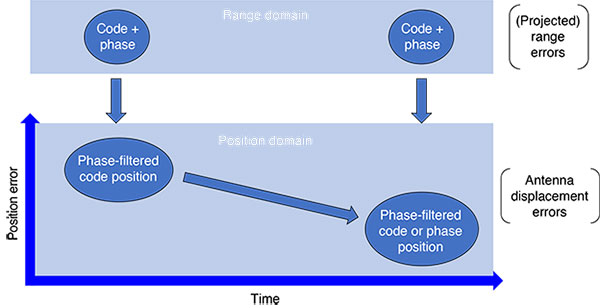
Unlike static relative positioning and RTK, conventional PPP does not make use of double-differencing, which is the mathematical differencing of simultaneous code and phase measurements from reference and remote receivers to greatly reduce or eliminate many error sources. Rather, PPP applies precise satellite orbit and clock corrections estimated from a sparse global network of satellite tracking stations in a state-space version of a Hatch filter (in which the noisy, but unambiguous, code measurements are filtered with the precise, but ambiguous, phase measurements). This filtering is illustrated in FIGURE 1, where measurements are continually added in time in the range domain, and errors are modeled and filtered in the position domain, resulting in reduced position error in time.
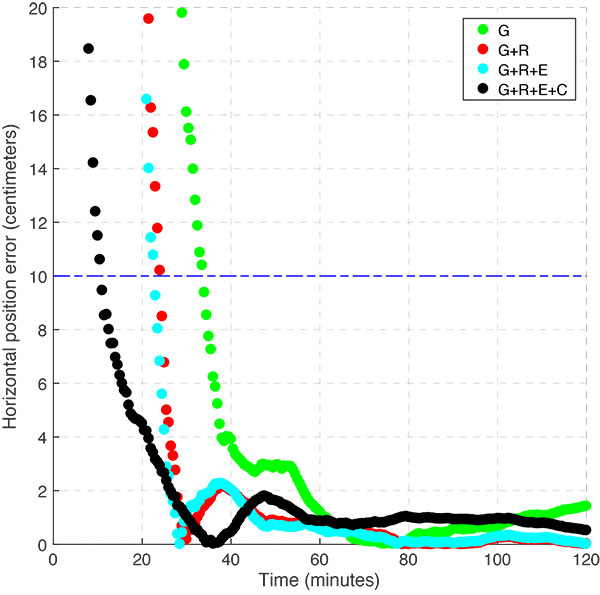
The result is the characteristic PPP initial convergence period seen in FIGURE 2, where the position solution is initialized as a sub-meter, dual-frequency code point positioning solution, quickly converging to the decimeter-level in something like 5 to 20 minutes, and a few centimeters after ~20 minutes when geodetic-grade equipment is used (at station ALGO, Algonquin Park, Canada, on Jan. 2, 2017). For static geodetic data, daily solutions are typically at the few millimeter-level of accuracy in each Cartesian component.

The primary benefit of conventional PPP is that with the use of state-space corrections from a sparse global network, there is the appearance of precise positioning from only a single geodetic receiver.
Therefore, baseline or network RTK limitations are removed in geographically challenging areas, such as offshore, far from population centers, in the air, in low Earth orbit, and so on, and without the need for the requisite terrestrial hardware and software infrastructure. PPP is now the de facto standard for precise positioning in remote areas or regions of low economic density, which limit or prevent the use of relative GNSS, RTK or network RTK, but allow for continuous satellite tracking. These benefits translate into the main commercial applications of offshore positioning, precision agriculture, geodetic surveys and airborne mapping, which also are not operationally bothered by initial convergence periods of tens of minutes.
For urban and suburban applications, RTK and especially network RTK allow for near-instantaneous, few-centimeter-level positioning with the use of reference stations and regional satellite (orbit and clock) and atmospheric corrections. The use of double-differencing and these local or regional corrections allows sufficient measurement error mitigation to resolve double-differenced phase ambiguities. All of this additional information is not available to conventional PPP, limiting its precise positioning performance, but which is considered in PPP enhancements.
Progress on PPP Convergence Limitations
Over the past decade or so, PPP R&D activity can be categorized as follows:
- Integration of measurements from multiple GNSS constellations, transitioning from GPS PPP to GNSS PPP;
- Resolution of carrier-phase ambiguities in PPP user algorithms — in an effort to increase positional accuracy and solution stability, but foremost in an effort to reduce the initial convergence period; and
- Use of a priori information to reduce the initial convergence and re-convergence periods and improve solution stability, making use of available GNSS error modeling approaches.
Unlike relative positioning, which makes use of measurements from the user receiver as well as the reference receiver, PPP only relies on measurements from the user site. This situation results in weaker initial geometric strength, and so the addition of more unique measurements is welcome. To make use of measurements from all four GNSS constellations (GPS, GLONASS, Galileo and BeiDou), user-processing engines must account for differences in spatial and temporal reference systems between constellations and numerous equipment delays between frequencies and modulations. The former can be done so that any number of measurements from any number of constellations can be processed to produce one unique PPP position solution. The latter requires a great deal of calibration, especially for heterogeneous tracking networks and user equipment (antenna, receiver and receiver firmware), most notably for the current frequency division multiple access GLONASS constellation.
FIGURE 3 shows typical multi-GNSS float (non-ambiguity-fixed) horizontal positioning performance at multi-GNSS station GMSD in Nakatane, Japan, on March 24, 2017. As with all modes of GNSS data processing, more significant improvement with additional constellations can be seen in sky-obstructed situations.
Related to multi-constellation processing is triple-frequency processing afforded by the latest generation of GPS satellites and the Galileo and BeiDou constellations. More frequencies mean more measurements, although with the same satellite-to-receiver measurement geometry as dual-frequency measurements. Again, additional signals require additional equipment delay modeling, in this case especially for the processing of GPS L1, L2 and L5 observables.
For processing of four-constellation data available from 20 global stations in early 2016, FIGURE 4 shows the average reduction of float (non-ambiguity-fixed) horizontal error from dual- to triple-frequency processing of approximately 40% after the first five minutes of measurement processing. In terms of positioning, this result, for this time period with a limited number of triple-frequency measurements, means a reduction in average horizontal positioning error from 43 to 26 centimeters within the first five minutes of data collection.

PPP with ambiguity resolution, or PPP-AR, was seen as a potential solution to the PPP initial solution convergence “problem” analogous to AR in RTK. Various researchers put forward methods, in the form of expanded measurement models, to isolate pseudorange and carrier-phase equipment delays to estimate carrier-phase ambiguities. These methods remove receiver equipment delays through implicit or explicit between-satellite single-differencing and estimate satellite equipment delays in the network product solution either as fractional cycle phase biases or altered clock products.
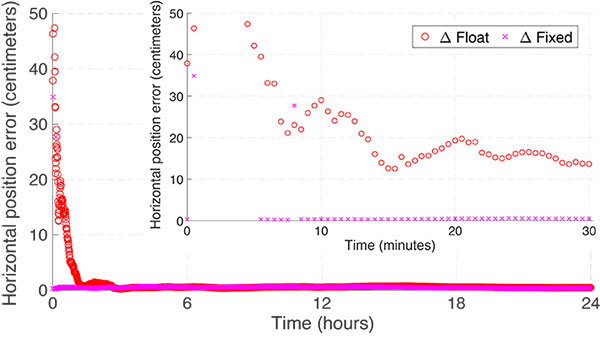
FIGURE 5 illustrates the difference between a typical GPS float and fixed solution (for station CEDU, Ceduna, Australia, on June 28, 2017). Initial solution convergence time is reduced, and stable few-centimeter-level solutions are reached sooner. For lower quality data, ambiguity fixing does not provide such quick initial solution convergence. Fixing is dependent on the quality of the float solution; and, for PPP, the latter requires time to reach acceptable levels of accuracy. Therefore, depending on the application, PPP-AR may or may not be helpful.
To consistently reduce the initial solution convergence period, PPP processing requires additional information, as is the case for network RTK, in which interpolated satellite orbit, ionospheric and tropospheric corrections are needed since double-differenced RTK baselines over 10 to 15 kilometers in length contain residual atmospheric errors too large to effectively and safely resolve phase integer ambiguities. For PPP, uncombining the ionospheric-free code and phase measurements from the conventional model is required, to directly estimate slant ionosphere propagation terms in the filter state.
In this form, the model can allow for very quick re-initialization of short data gaps by using the pre-gap slant ionospheric (and zenith tropospheric) estimates as down-weighted a priori estimates post-gap — making these estimates bridging parameters in the estimation filter. Expanding this approach, external atmospheric models can be used to aid with initial solution convergence.
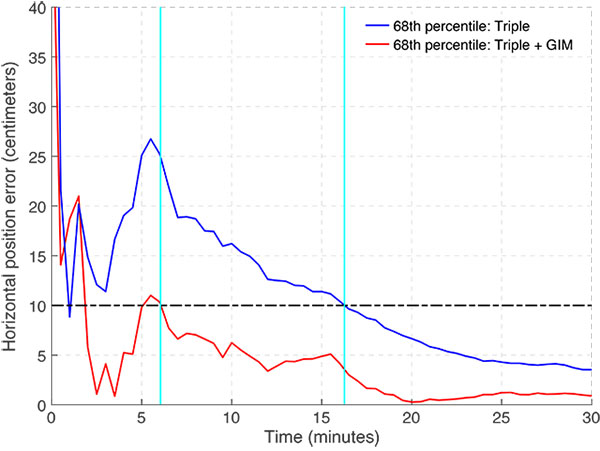
FIGURE 6 illustrates, for a large dataset, that applying a spatially and temporally coarse global ionospheric map (GIM) to triple-frequency, four-constellation float processing can reduce one-sigma convergence time to 10 centimeters horizontal positioning error from 16 to 6 minutes. If local ionospheric (and tropospheric) corrections are available and AR is applied, PPP (sometimes now referred to as PPP-RTK) can produce RTK-like results with a few minutes of initial convergence to few-centimeter-level horizontal solutions.
PPP Processing with Low-Cost Hardware
As the impetus for low-cost, precise positioning and navigation for autonomous and semi-autonomous platforms (such as land vehicles and drones) continues to grow, there is interest in processing such low-cost data with PPP algorithms. For example, it has been shown that with access to single-frequency code and phase measurements from a smartphone, short-baseline RTK positioning is possible. It has also been shown that similar smartphone data can be processed with the PPP approach. From the origins of PPP, it may be argued that single-frequency processing and many-decimeter-level positioning performance is not “precise.” But we will avoid such semantic arguments here (but see “Insights”), and focus on the use of high-performance measurement processing algorithms to new low-cost hardware. We are currently witnessing great changes in the GNSS chip market: single-frequency chips for tens-of-dollars or less; and boards with multi-frequency chips for hundreds-of-dollars. And these chips will continue to undergo downward price pressure with increases in capability, and be further enabled for raw measurement use in a wider range of applicable technology solutions. There are now a number of low-cost, dual-frequency, multi-constellation products on the market, with additional such products as well as smartphone chips coming soon.
To process data from such products with a PPP engine, modifications are required to optimally account for single-frequency measurements in the estimation filter, optimize the measurement quality control functions for the much noisier code and phase measurements compared to data from geodetic receivers, and optimize the stochastic modeling for the much noisier code and phase measurements. The single-frequency measurement model can be modified to either make use of the Group and Phase Ionospheric Calibration linear combination (commonly referred to as GRAPHIC) or ingest data from an ionospheric model. Due to the use of low-cost antennas, as well as the low-cost chip signal processing hardware, code and phase measurements suffer from significant multipath and noise at lower signal strengths; therefore, outlier detection functions must be modified. Also, the relative weighting of code and phase measurements must be customized for more realistic low-cost data processing.
FIGURE 7 compares the carrier-to-noise-density ratio (C/N0) values from ~1.5 hours of static GPS L1 signals collected from a geodetic receiver with a geodetic antenna, a low-cost receiver chip with a patch antenna, and a tablet chip and internal antenna, as a function of elevation angle. Received signal C/N0 values can be used as a proxy for signal precision. The three datasets were collected at the same time in mid-September 2017 in Toronto, Canada, with the receivers and antennas within a few meters of each other. The shading represents the raw estimates output from each receiver, while the solid lines are moving-average filtered results.
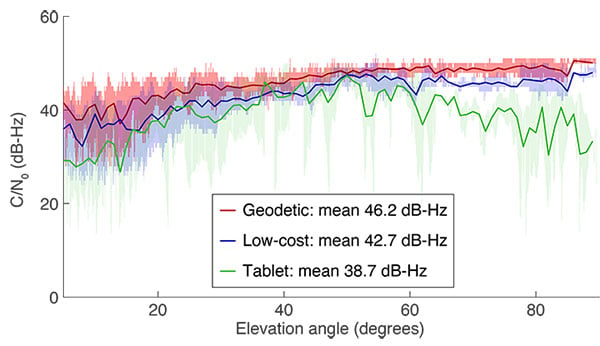
Keeping in mind the log nature of C/N0, the high measurement quality of the geodetic antenna and receiver are clear. The low-cost chip and patch antenna signal strength structure is similar, but, on average, 3.5 dB-Hz lower. And the tablet received signal strength is lower still, on average a further 4.0 dB-Hz lower, with greater degradation at higher signal elevation angles and much greater signal strength variation.
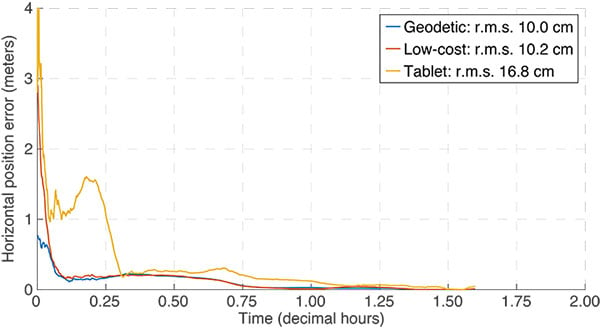
The PPP horizontal position uncertainty for these datasets is shown in FIGURE 8. Note that reference coordinates have been estimated from the datasets themselves, so potential biases, in especially the low-cost and tablet results, can make these results optimistic. Given that only single-frequency GPS code and phase measurements are being processed, initial convergence periods are short and horizontal position error reaches steady state in the decimeter range. The geodetic and the low-cost results are comparable at the 2-decimeter level, whereas the tablet results are worse, at the approximately 4-decimeter level. Initial convergence of the geodetic solution is superior to the others, driven by the higher quality of its code measurements. The grade of antenna plays a large role in the quality of these measurements, for which there are physical limitations in design and fabrication. While geodetic antennas can be used, this is not always feasible, given the mass limitations of certain platforms or the cost limitations for certain applications.
Comments Regarding the Near Future
The PPP GNSS measurement processing approach was originally designed to greatly reduce computation burden in large geodetic networks of receivers by removing the need for network baseline processing. The technique found favor for applications in remote areas or regions with little terrestrial infrastructure, including the absence of GNSS reference stations. Given PPP’s characteristic use of a single receiver for precise positioning, various additional augmentations have been made to remove or reduce solution initialization and re-initialization interval to near RTK-like levels. But, to what end?
This question can be approached from multiple perspectives. From the theoretical standpoint, there is the impetus to maximize performance — millimeter-level static positioning over many hours, and few-centimeter-level kinematic positioning in a few minutes — by augmenting PPP in any way necessary. There is the academic exercise of maximizing performance without the need for local or regional reference stations – apparent single-receiver positioning, or truly wide-area augmentation. In terms of engineering problems, we can work to do more with less, that is, decimeter-level positioning with ultra-low-cost hardware, or the same with less, that is, few-centimeter-level positioning with low-cost hardware. And from the practical or commercial aspect, the great interest is for the implementation of evolved PPP methods for applications that can efficiently and effectively make use of the technology.
In terms of service providers, be it regional or global, commercial or public, there is momentum to provide enhanced correction products that are blurring the lines across the service spectrum from constellation-owner tracking to regional, terrestrial augmentation. A public GNSS constellation-owner, through its constellation tracking network, can provide PPP-like corrections and services. A global commercial provider with or without regional augmentation can provide similar services. The key is providing multi-GNSS state-space corrections for satellite orbits, satellite clocks, satellite equipment delays (fractional phase biases), zenith ionospheric delay and zenith tropospheric delay at the temporal and spatial resolution necessary for the desired positioning performance at reasonable cost, that is, subscription fees that particular markets can bear.
Given these correction products, PPP users have a greater ability to access a wide array of positioning performance levels for various new applications, be it few-decimeter-level positioning on mobile devices to few-centimeter-level positioning for autonomous or semi-autonomous land, sea and air vehicles. PPP can be used for integrity monitoring and perhaps safety-of-life applications where low-cost is a necessity and relatively precise positioning for availability and integrity purposes is required. For safety critical and high-precision applications, such as vehicle automation, PPP can be used alongside, or in combination with, RTK for robustness and independence with low-cost hardware. Such a parallel and collaborative approach would require a hybrid user processing engine and robust state-space corrections from a variety of local, regional and global sources, as we are seeing from some current geodetic hardware-based commercial services.
Near-future trends should also include more low-cost, multi-sensor integration with PPP augmentation. Optimized navigation algorithms and efficient user processing engines will be a priority as the capabilities of low-cost equipment continue to increase and low-cost integrated sensor solutions are required for mass-market applications. Analogous to meter-level point position GNSS, lower hardware costs should drive markets to volume sales, PPP-like correction services, and GNSS-based multi-sensor integration into more navigation technology solutions for various industry and consumer applications.
Clearly, the future of PPP continues to be bright.
SUNIL BISNATH is an associate professor in the Department of Earth and Space Science and Engineering at York University, Toronto, Canada. For over twenty years, he has been actively researching GNSS processing algorithms for a wide variety of positioning and navigation applications.
JOHN AGGREY is a Ph.D. candidate in the Department of Earth and Space Science and Engineering at York University. He completed his B.Sc. in geomatics at Kwame Nkrumah University of Science and Technology, Ghana, and his M.Sc. at York University. His research currently focuses on the design, development and testing of GNSS PPP software, including functional, stochastic and error mitigation models.
GARRETT SEEPERSAD is a navigation software design engineer for high-precision GNSS at u-blox AG and concurrently is completing his Ph.D. in the Department of Earth and Space Science and Engineering at York University. His Ph.D. research focuses on GNSS PPP and ambiguity resolution. He completed his B.Sc. in geomatics at the University of the West Indies in Trinidad and Tobago. He holds an M.Sc. degree in the same field from York University.
MANINDER GILL is a geomatics designer at NovAtel Inc. and concurrently is completing his M.Sc. in the Department of Earth and Space Science and Engineering at York University. His M.Sc. research focuses on GNSS PPP and improving positioning accuracy for low-cost GNSS receivers. He holds a B.Eng. degree in geomatics engineering from York University.
FURTHER READING
• Comprehensive Discussion of Technical Aspects of Precise Point Positioning
“Precise Point Positioning” by J. Kouba, F. Lahaye and P. Tétreault, Chapter 25 in Springer Handbook of Global Navigation Satellite Systems, edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
• Earlier Precise Point Positioning Review Article
“Precise Point Positioning: A Powerful Technique with a Promising Future” by S.B. Bisnath and Y. Gao in GPS World, Vol. 20, No. 4, April 2009, pp. 43–50.
• Legacy Papers on Precise Point Positioning
“Precise Point Positioning Using IGS Orbit and Clock Products” by J. Kouba and P. Héroux in GPS Solutions, Vol. 5, No. 2, October 2001, pp. 12–28, doi: 10.1007/PL00012883.
“GPS Precise Point Positioning with a Difference” by P. Héroux and J. Kouba, a paper presented at Geomatics ’95, Ottawa, Canada, 13–15 June 1995.
“Precise Point Positioning for the Efficient and Robust Analysis of GPS Data from Large Networks” by J.F. Zumberge, M.B. Heflin, D.C. Jefferson, M.M. Watkins and E.H. Webb in Journal of Geophysical Research, Vol. 102, No. B3, pp. 5005–5017, 1997, doi: 10.1029/96JB03860.
• Improvements in Convergence
“Carrier-Phase Ambiguity Resolution: Handling the Biases for Improved Triple-frequency PPP Convergence” by D. Laurichesse in GPS World, Vol. 26, No. 4, April 2015, pp. 49-54.
“Reduction of PPP Convergence Period Through Pseudorange Multipath and Noise Mitigation” by G. Seepersad and S. Bisnath in GPS Solutions, Vol. 19, No. 3, March 2015, pp. 369–379, doi: 10.1007/s10291-014-0395-3.
“Global and Regional Ionospheric Corrections for Faster PPP Convergence” by S. Banville, P. Collins, W. Zhang and R.B. Langley in Navigation, Vol. 61, No. 2, Summer 2014, pp. 115–124, doi: 10.1002/navi.57.
“A New Method to Accelerate PPP Convergence Time by Using a Global Zenith Troposphere Delay Estimate Model” by Y. Yao, C. Yu and Y. Hu in The Journal of Navigation, Vol. 67, No. 5, September 2014, pp. 899–910, doi: 10.1017/S0373463314000265.
“External Ionospheric Constraints for Improved PPP-AR Initialisation and a Generalised Local Augmentation Concept” by P. Collins, F. Lahaye and S. Bisnath in Proceedings of ION GNSS 2012, the 25th International Technical Meeting of the Satellite Division of The Institute of Navigation, Nashville, Tennessee, Sept. 17–21, 2012, pp. 3055–3065.
• Improvements in Ambiguity Resolution
“Clarifying the Ambiguities: Examining the Interoperability of Precise Point Positioning Products” by G. Seepersad and S. Bisnath in GPS World, Vol. 27, No. 3, March 2016, pp. 50–56.
“Integer Ambiguity Resolution on Undifferenced GPS Phase Measurements and Its Application to PPP and Satellite Precise Orbit Determination” by D. Laurichesse and F. Mercier, J.-P. Berthias, P. Broca and L. Cerri in Navigation, Vol. 56, No. 2, Summer 2009, pp. 135–149.
“Resolution of GPS Carrier-phase Ambiguities in Precise Point Positioning (PPP) with Daily Observations” by M. Ge, G. Gendt, M. Rothacher, C. Shi and J. Liu in Journal of Geodesy, Vol. 82, No. 7, July 2008, pp. 389–399, doi: 10.1007/s00190-007. Erratum: doi: 10.1007/s00190-007-0208-3.
“Isolating and Estimating Undifferenced GPS Integer Ambiguities” by P. Collins in Proceedings of ION NTM 2008, the 2008 National Technical Meeting of The Institute of Navigation, San Diego, California, Jan. 28–30, 2008, pp. 720–732.
• Precise Positioning Using Smartphones
“Positioning with Android: GNSS Observables” by S. Riley, H. Landau, V. Gomez, N. Mishukova, W. Lentz and A. Clare in GPS World, Vol. 29, No. 1, January 2018, pp. 18 and 27–34.
“Precision GNSS for Everyone: Precise Positioning Using Raw GPS Measurements from Android Smartphones” by S. Banville and F. van Diggelen in GPS World, Vol. 27, No. 11, November 2016, pp. 43–48.
“Accuracy in the Palm of Your Hand: Centimeter Positioning with a Smartphone-Quality GNSS Antenna” by K.M. Pesyna, R.W. Heath and T.E. Humphreys in GPS World, Vol. 26, No. 2, February 2015, pp. 16–18 and 27–31.















