No audio available for this content.
Can They Be Better?
By Tony Haddrell, Marino Phocas, and Nico Ricquier
We examine the antenna designs that provide GPS functionality to mobile phones and why most phones still do not provide GPS operation indoors. We also see what it will take to make them better.

WHAT ARE THREE THINGS THAT MATTER MOST for a good GPS signal? Antenna, antenna, antenna. The familiar real-estate adage can be rephrased for this purpose, although the original — location, location, location — is valid here, too.
GPS satellite signals are notoriously weak compared to familiar terrestrial signals such as those of broadcast stations or mobile-phone towers. However, if an appropriate antenna has a clear line-of-sight to the satellite, excellent receiver performance is the norm. But what constitutes an appropriate antenna? The GPS signals are right-hand circularly polarized (RHCP) to provide fade-free reception as the satellite’s orientation changes during a pass. A receiving antenna with matching polarization will transfer the most signal power to the receiver. Microstrip patch antennas and quadrifilar helices, two RHCP antennas commonly used for GPS reception, have omnidirectional (in azimuth) gain patterns with typical unamplified boresight gains of a few dB greater than that of an ideal isotropic RHCP antenna.
But what happens when signals are obstructed by trees or buildings or, worse yet, when we move indoors? Received signal strength plummets. A conventional receiver, even with a good antenna, will then have difficulty acquiring and tracking the signals, resulting in missed or even no position fixes. However, thanks in large part to massive parallel correlation, receivers have been developed with 1,000 times more sensitivity than conventional receivers, permitting operation in restricted environments, albeit usually with reduced positioning accuracy. But such operation requires a standard antenna.
So, do the GPS receivers in our mobile phones now work everywhere? Sadly, no. Consumers demand that their phones not only provide voice communications and GPS but also Bluetooth connectivity to headsets, Wi-Fi, and even an FM transmitter, all in a small form factor at reasonable cost. This requires miniaturizing the GPS antenna and possibly integrating it with the other radio services on the platform. Such compromises can, if the designer is not careful, significantly reduce receiver effectiveness with dramatically reduced antenna gain and distorted antenna patterns. This month we look at some antenna designs providing GPS functionality to mobile phones and examine why most phones still do not provide GPS operation indoors or in other challenging environments. We also find out what it will take to make them better.
“Innovation” is a regular column that features discussions about recent advances in GPS technology and its applications as well as the fundamentals of GPS positioning. The column is coordinated by Richard Langley of the Department of Geodesy and Geomatics Engineering at the University of New Brunswick, who welcomes your comments and topic ideas.
GPS is becoming a must-have feature in mobile phones, with major manufacturers launching new designs regularly, and second-tier manufacturers rapidly catching up. A quick test of any early GPS-equipped phone shows that although the incumbent GPS chip (or chipset) has high sensitivity, the integrated end result cannot perform in low signal conditions. Several challenges facing the phone designer are responsible for this, with the main two being the antenna performance and interference in the GPS band generated within the phone platform itself.
Here we explore the antenna’s role in determining overall performance of the GPS function in a mobile phone, and the potential for avoiding some platform jamming signals by choice of antenna technology.We present some results from an ongoing company study, as part of our remit to assist customers at the system integration level in support of GPS chip sales.
Many handset makers are not GPS or even RF experts, and rely on catalog components to provide their GPS and antenna hardware. Often unsuitable antennas are chosen, or the antennas are integrated in such a way that the original operation mode does not work. Study of a number of candidate phones has shown that, due to the small ground plane available, the antenna component may be merely a band-tuning device, with the ground plane contributing the signal collection function.
At the beginning of 2008, our team launched a project to understand and prioritize the problems for handset makers in the antenna area, and to provide better solutions than those currently in use.
The handset designer faces several problems when incorporating a GPS antenna. First, it has to be very low cost (a few cents, probably). Secondly, it has to be broadly omnidirectional, since there is no knowledge of “up” on a mobile phone, although some manufacturers rely on the fact that location will only be needed when the phone is in the user’s hand or an in-car holder. From the GPS receiver point of view, we would like the antenna to be as far from the communications (transmitting) antenna as possible, and also removed from other transmitting services such as Bluetooth, Wi-Fi, and FM. Users must not be able to detune the antenna out of band by placing their hands on the phone, or by raising the phone to their ears. In a perfect world, they would not obscure an antenna either.
Of course, we would also like to remove some of that platform interference at the antenna stage, and techniques such as differential RF inputs (with a differential antenna) have been proposed in the search for better noise-cancellation performance.
All of this leaves the handset designer with an impossible task, since he has run out of space to fit a decent GPS antenna with all the isolation requirements, and we typically measure GPS antennas that average 26 to 215 dB of gain with respect to a reference dipole, which measures around 21 dB compared to an isotropic antenna when integrated in the handset. Given that a 2 dB loss equates to double the time to fix (in low signal environments) or, alternately, double the amount of baseband signal-search hardware in the GPS chip, it follows that we must exert some effort to help handset integrators implement better antennas. In this respect, some larger manufacturers have in-house projects running, but smaller ones do not have antenna design teams and rely on their suppliers to provide solutions.
So, we start with cataloging the requirements, and given that most current implementations are only in the “mediocre to terrible” class, we look at ways of improving things accordingly. Of course, there are good GPS antenna solutions out there, but handset designers have mostly shunned them on the grounds of cost or even size. Restrictions on these parameters severely hamper the antenna designer, as reducing a GPS L1 antenna below its “natural” size — about 4 centimeters for a monopole on commonly used FR4-type printed circuit board (PCB) material — inevitably means either using some higher dielectric material, which adds cost, or folding the structure up, which decreases performance.
Single-ended antennas, such as monopoles and microstrip patches, rely on a ground plane, which in a handset is undersized anyway, and is usually difficult to identify and model. True differential designs (such as a dipole) overcome this problem, but are automatically larger. As handsets get smaller and encompass more “connectivity”
(that is, more radio links, including GPS) and competition for antenna space increases, combined antennas become attractive, as they would at least help with the size issue. However, the isolation problems are increased, and since our various radios all (currently) need individual RF inputs, some new layer of complexity and filtering is needed between antenna and chip.
Theory, Performance. We undertook some practical experiments to get a feel for the gap between an antenna’s theoretical performance and its installed performance when integrated with the other phone functions. At present, the idea of modeling all the radiation interactions and mechanical arrangements within such a platform is beyond the scope of the available tools, and so practical measurements are really our only choice in the quest for better antennas.
Finally, we provide some insight into the future, given the rapid advancements driven by mobile-phone technology and the advent of the low-cost handset for new emerging markets. New challenges loom ahead for GNSS antennas, not the least being more bandwidth and multiple frequencies, and we look briefly at what must be done to keep up with handset manufacturers’ requirements in this regard.
Size of the Problem
Location-based services in mobile phones is now an expected function by the more discerning user. With more than 500 million users of such services expected by 2011, pressure on manufacturers to provide ever better user experiences and competition between phone manufacturers will bring pressure on the GPS industry for improved performance. GNSS is now the location technology of choice for mobile phones and will remain so provided that the industry can maintain leadership in cost, size, and performance. FIGURE 1 shows the expected penetration of GNSS (mostly just GPS) in the next few years.
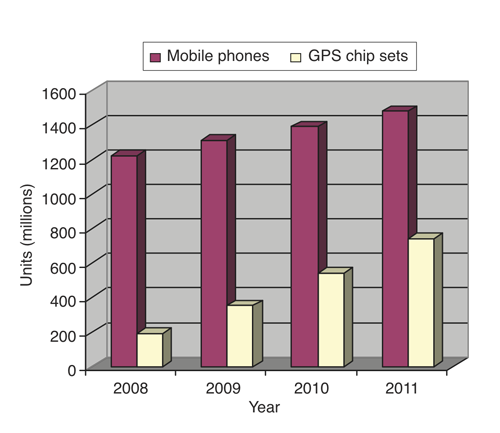
With this many users, the market will soon decide whether the performance is up to expectation or not; this in itself will determine GPS penetration going forward.
Vanishing Space. The first challenge facing the RF antenna designer working on a mobile phone is the size of the whole platform. As the size of the average phone continues to fall, manufacturers are understandably reluctant to increase size again to add new features, such as GPS. Consider the wavelengths of a phone’s various RF services. If the corresponding antennas were implemented as dipoles, the antennas would be bigger than the phone. Clearly the competition for antenna space is high. The designer will want to separate the antennas as much as possible to reduce coupling between them, both in the sense of coupling interference from one service to another (known as isolation) and in the sense of spoiling the pattern (or field) of one antenna with another (interaction).
The chip business addresses the space issue through the advent of combination or combo chips, containing such peripheral services as FM (both receive and transmit), Bluetooth, GPS, and Wi-Fi. While helping with space constraints, this development brings new challenges as these radios have to cohabit the same silicon and still perform individually, whatever the other radios are doing (transmitting music to the car radio using FM while navigating with GPS, for example). It follows that combo antennas similarly save space, but since this might involve simultaneous transmit and GPS receive functions, it is very difficult to achieve the necessary isolation, especially if the user’s body can change the coupling between functions.
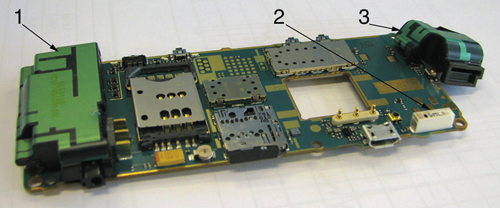
FIGURE 2 shows a modern phone with some antennas identified. Not shown is the FM transmit antenna on the rear (the receive function uses the headset cable). One commercially available combo antenna and two custom-made antennas are designed to fit the mechanical layout of the phone. The GPS antenna has been placed at the top of the phone, relegating the communications antenna (really another combo since it handles four frequency bands) to the bottom of the phone, where it is subject to detuning by the user’s hand. The GPS antenna is of the PIFA (planar inverted F antenna) type, working against the ground plane of the main PCB, and is printed on a plastic molding that also implements a loudspeaker and its electrical connections.
Size. Until now, we have not looked at the size of GPS antennas. We know that a dipole (on FR4 PCB material) is about 8 centimeters in length, just a little shorter than the average phone platform. Changing to a monopole halves the natural length, but requires an “infinite” ground plane to work against. Ignoring this requirement, some manufacturers simply print a monopole on the main PCB, and put up with the coupling, losses, and pattern deficiencies that arise. Some while ago, we measured the gain of such an arrangement at about 212 dB relative to the reference dipole. So designers have turned to size-reduced antennas, either by using higher dielectric materials to form them, or by using complex shape and feed derivatives (such as the PIFA in Figure 2.)
Another combo idea is to use the communications antenna. In the case shown in FIGURE 3, this is a whip-type antenna on a clamshell-type phone. Although the antenna is free for GPS and uses no additional space, the components to tune the whip for GPS and prevent the transmit bands reaching the GPS low noise amplifier (LNA) add both cost and size. So this is not really too attractive, especially when measurements show a 216 dB performance relative to our dipole, along with a poor coverage pattern. In this model, removing the whip and leaving the ferrule to which it connects provided a 6 dB improvement in performance (for GPS only; obviously it spoils the communications function).

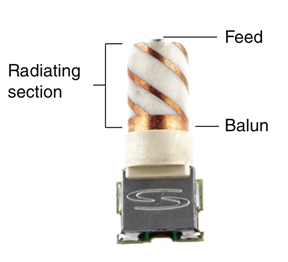
A more conventional approach is to fit an off-the-shelf GPS antenna. The problem here is that any component-type antenna will have been tested with some standardized ground plane, and most are reliant on the ground plane for both tuning, and pattern and gain. A truly balanced design avoids this problem; FIGURE 4 shows an example. Although these antennas have found favor in personal navigation devices for their superior performance, they are not usually considered for mobile phones because of cost and size considerations. This antenna did, however, give us a reference device against which we could make comparative measurements when undertaking the practical test campaign.
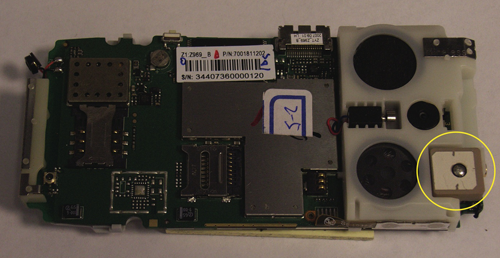
A more usual selection is the patch type, long standard in the GPS industry. One such installation is shown in FIGURES 5 and 6, which offer two views of the same stripped-down phone. The main drawback of this arrangement is the lack of a ground plane visible to the patch antenna, giving both tuning and gain/pattern problems. We measured the gain of this antenna at about 28 dB compared to a dipole antenna connected to the same point in the circuit, which is actually at the better end of the performance range that we see. The designers gave the antenna a position at the top of the phone, as in the Figure 2 phone, but it is still squeezed for space onto the edge of the PCB in favor of the phone’s speakers and the camera components. In this phone, the communications antenna is again at the bottom of the PCB.

Interference and Isolation. The related characteristics of interference and isolation are difficult to specify and model, leading to practical measurements as the only way of accurately characterizing them. Of course, since the mechanical arrangement (including plastics, screen, battery, and PCB components) plays such a large part in determining the levels of interference and isolation, these tests can only be carried out once the phone is at the prototype stage, when major surgery to improve any particular aspect is not really an option. This also creates a problem when considering new approaches, as the result may not resemble the stand-alone tests, unless the antenna element chosen really has no significant interaction with the rest of the phone.
Most interference we see in mobile phones gets into the GPS receiver at the antenna. Typically this is followed by an RF filter of some sort, which although it spoils the noise figure, does eliminate the out-of-band transmissions from the other radios on the platform. Usually we see a plethora of self-generated in-band signals that have entered the GPS receiver via the antenna. Although we can’t filter them out, we can reduce the coupling between antenna and source as much as possible. One effect seen in current offerings is that the GPS antenna may actually be much better at coupling to interferers than it is at extracting GPS signals from free space, thus making the problem worse.
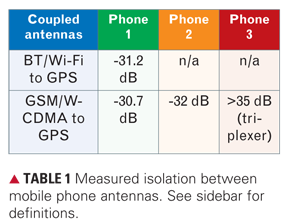
To get a view of the coupling between antennas, we tested a few available phone types to see what was the actual coupling in the antenna band of interest (see TABLE 1). Of course, one advantage of a poor antenna is that its coupling is likely to be less to adjacent antennas. Coupling is also seriously affected by the user holding the phone or the surface on which it is placed. Phones in a pocket seem to be more affected in this way. The table shows measurements with the phone assembled as completely as possible (we have to get connectivity at the antennas) but not being affected by a user or the phone’s environment.
Requirements
To develop requirements for a better antenna implementation, we need to consider the factors discussed above, and to develop numerical specifications against each. Given the variables involving user interaction, mechanical changes from model to model, use cases and the ever-increasing pressure on cost and size, this is far from straightforward. Our team has spent considerable time defining requirements, and a short synopsis is reported here.
In addition to the coexistence requirements (see the next section), the antenna should fulfill the following criteria:
- Minimum cost. The antenna should be of low implementation cost, preferably printed and not requiring complex connectivity to the main PCB, or to require any setup and/or tuning in production;
- Low loss. The GPS industry is used to antennas delivering around 0–3 dB (isotropic) in an upper hemispheric direction. We believe this will not be attainable in a mobile phone, but we set the gain target at an aggressive -4 dB (isotropic);
- Detuning. The antenna must continue to perform to specification with any reasonable detuning environment (such as user handling, pocket, and metal surfaces);
- Mechanical arrangement. The antenna should be of minimum dimensions that can fit the phone mechanics. For example, long and thin may be acceptable along one side of the phone. Also placement near the GPS chip avoids lossy RF tracking;
- Gain pattern. Essentially omnidirectional, accepting that other parts of the phone may cause localized dips in the pattern.
Coexistence and Cohabitation. Initially we aim to define the parameters affecting interaction with other services on the phone platform. By coexistence, we mean the ability to share a platform with the other radios and antennas and only be marginally affected by them, whatever they are doing (such as transmitting full power, low power, or idling, and with any frequency choice). This produces a straightforward immunity table (see TABLE 2) once we have determined the basic isolation between all of the elements. For the purposes of Table 2, we have chosen 15 dB as the minimum isolation value between any two antennas. Obviously there are similar tables for the other functions (GSM, 3G, Wi-Fi, Bluetooth, FM) as well.

A glance at Table 2 will tell the reader that the modern mobile phone implements a vast number of transmit and receive frequencies, modulation types, and standards. Of particular concern to the GPS designer is the advent of wideband CDMA signals, which can cause intermodulation products to appear in band at the intermediate frequency of the GPS receiver. Special receiver techniques are required in this case, but the antenna is unable to help except by being of naturally narrow bandwidth.
Cohabitation is a newer concept that describes the isolation between functions of the same device. In this respect, we are investigating GPS antennas combined with Wi-Fi and Bluetooth services. This is a fairly natural development, since these functions are all add-ons to a conventional phone platform, and there is a space-saving advantage in the combination. Since Wi-Fi and Bluetooth share the same band at 2.4 GHz, they have arrangements internally that allow them to coexist or choose which service is to be used if a clash is inevitable.
As a precursor to forming some specifications, our team measured a commercially available combined antenna, and TABLE 3 shows the isolation results.
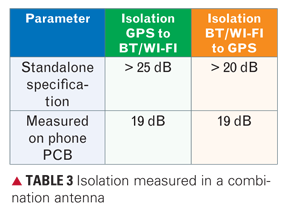
The table highlights the need to measure antennas on a representative PCB, since other coupling factors reduce the specified isolation by >6 dB compared to the manufacturer’s reference setup, where the part is the only component on the demonstration board.
Real-Life Testing
A number of tests were carried out on available solutions to gain some information and experience about current offerings and platforms.
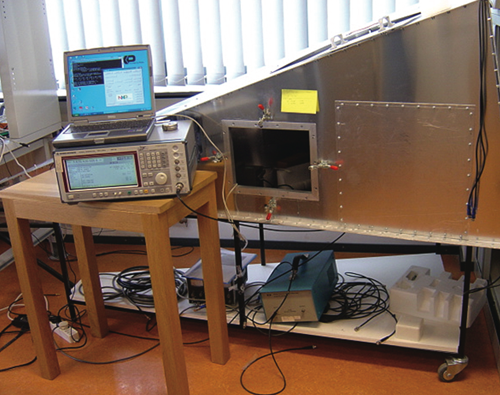
At one of our facilities, we have a GTEM (gigahertz transverse electromagnetic) cell, which was constructed in house and has been verified to be working properly (see FIGURE 7). A GTEM cell is an expanded transmission line within which a uniform electromagnetic field can be generated for determining antenna properties such as gain and bandwidth. The internal space at the septum (40 centimeters) is big enough to handle antenna sizes used by GPS. It has a small side door and some feedthroughs (coaxial) to the bottom plate. The RF foam absorbers used inside the GTEM work well at 1.5 GHz (the cell can work from 100 MHz to above 10 GHz).
Differential vs. Single-Ended Antennas. The first test conducted concerned comparison of balanced and unbalanced antennas, the theory being that a balanced antenna would help with interference because it would be presented to the GPS receiver as a common mode signal (that is, balanced on the positive and negative inputs). The NXP GNS7560 single-chip GPS solution is configurable for single or differential input to the LNA, and was used to conduct the tests.
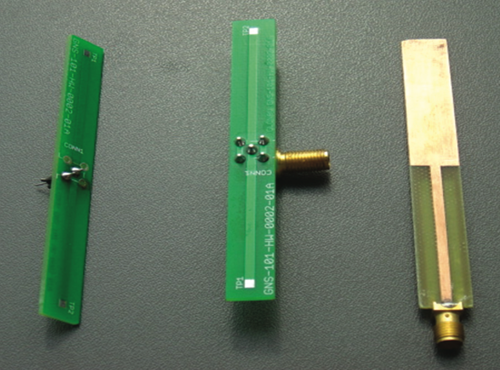
The trial began with calibration of the test setup using the balanced antenna shown in Figure 4, against which we measured a printed dipole antenna and a monopole equivalent, arranged to incorporate a balun to make it of the same size as the dipole (see FIGURE 8). Once this calibration had been made, we sought to generate an interfering signal on the GPS receiver test board so that comparisons of interference rejection could be made. This was done in two different ways, in case the method of exciting the GPS board was subject to resonances or peculiar standing-wave modes. First, we injected an RF interferer into the power supply via the USB cable that was both powering the GPS board and the communications link to it. The jamming created in this manner was increased until a predetermined drop in GPS sensitivity was reached. A number of frequencies were tried and the results compared. In the second setup, we directly applied an RF signal across the ground plane of the GPS board, using a coaxial feed to excite the ground plane, and repeated the stages described above.
Results for both tests were within 2 dB of each other, and showed that the differential approach could reduce local jammer pickup by only 4–6 dB. This is probably due to the differential structure being of similar size to the test platform (chosen to be similar to a phone platform), and therefore not achieving true differential coupling to the on-board radiated jammer. With this marginal advantage, we concluded that the benefit was barely justified by the extra complexity and size involved in differential antennas. Note that this conclusion may be different for smaller (for example, high dielectric) differential antennas, although these are currently not available. We are resolved to revisit this possibility at a later date.
Testing Some Commercial Parts. Having elected to continue in unbalanced-only mode, we tested some commercially available antenna components, which are all aimed at mobile phones and span a range of technologies. Each antenna was tested on its recommended reference design without other mobile phone components or features. However, we did use phone-sized boards, representative plastics, and a real user’s hand in these tests. TABLE 4 shows the comparative results.
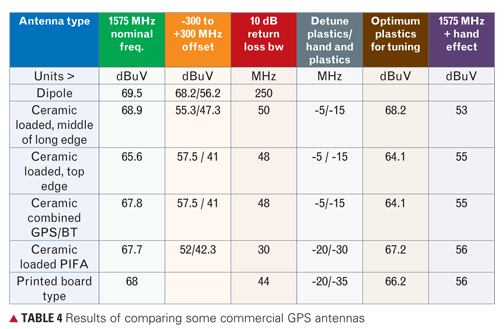
For return loss measurements we used a vector network analyzer and a ferrite absorber clamp to suppress cable common-mode effects. For measuring the antenna-received voltage, we used an open-air setup with a horn antenna placed 1 meter away from the DUT (device under test) antenna. The horn is fed with a 100 dBuV 1575 MHz CW signal and the received signal at the DUT is inspected with a spectrum analyzer. The horn is mounted so that we have vertical polarization. Initially, we were only concerned with looking for the maximum attainable voltage and we have positioned the DUT also to vertical polarization. Wooden tables were used to avoid reflections. The last two columns in Table 4 are with plastic in close proximity to the antenna element and the last column is with the plastic grabbed by the hand (as one would grab a phone).
The first thing to note is that of the antennas reported above (which were the best of a bigger number of test pieces) the performance is roughly the same for all of them when configured in their reference mechanical arrangement and not interacting with the phone environment. From the table, we can see that for the particular antenna tested in two positions, its location on the ground plane defines its performance (the ceramic-loaded antenna lost 3 dB in voltage terms when moved to the shorter side of the board). This may be a problem in that the best position performance-wise is not the best for the case where the user interacts with the complete assembly. Also, we see that the user and the plastics have a big effect. In short, the component-type antennas currently available don’t show exciting performance in a real environment, but most are competent GPS antennas when integrated according to their makers’ instructions. However, this is often not possible due to mechanical and other constraints. One drawback of the monopole type of device is its need for a ground-plane-free area underneath the component, and this often conflicts with the requirements of the other antennas, which are looking to maximize the ground plane in the phone.
Novel Approaches, Validation
We started this program to identify the requirements of a good GPS antenna, test some theories and current components, and then develop a new approach. From the foregoing, it is clear that a design that is part of the phone mechanics itself will be better integrated and more predictable in the final implementation. Our design team has begun to model and test some more PCB-centric solutions that attempt to mimic at least the current performance of commercial components, and to minimize the amount of ground-plane loss. We do all our testing on representative (in size and conductivity) phone PCBs. A new approach to thinking about potential arrangements is to use the previously mentioned concept that the whole board is the radiator and the antenna is actually a tuning and feed device. One promising possibility is a slot antenna (or slot feed) formed by removing a small notch of ground plane along the top edge of the phone PCB. Some phones have demonstrated success in forming Bluetooth antennas in this manner, although the lower frequency of GPS does not help.
On a separate path, another idea is to print a PIFA (or similar structure) on the plastics themselves and have it work against the phone ground plane in total. In this case, it is relatively easy to get good performance, but connection of the feed to the main board (where the GPS chipset will be located) is a non-trivial mechanical problem.
Testing of some candidate solutions is under way, and we expect reference designs for customer use to be the deliverable from this work. In addition, it is clear that there is not a one-solution-fits-all conclusion, and that more work will be necessary as phone and GPS designs are further developed.
Acknowledgments
The authors thank the antenna engineering team at NXP’s Mobile and Personal Innovation Center, especially Tony Kerselaers, Felix Elsen, and Norbert Philips who conducted the trials reported here. This article is based on the paper “A New Approach to Cellphone GPS Antennas” presented at ION GNSS 2008.
TONY HADDRELL is a fellow staff architect.
ST-Ericsson in Daventry, England, and a director of iNS Ltd., Weedon, England.
MARINO PHOCAS is an RF systems engineer with ST-Ericsson.
NICO RICQUIER heads the Connectivity Group at NXP Semiconductors in Leuven, Belgium.
Some Mobile Phone Terms
Bluetooth (BT). A communications protocol operating in the 2.4 GHz Industrial, Scientific and Medical (ISM) frequency band, enabling electronic devices to connect and communicate in short-range ad hoc networks.
CDMA. Code division multiple access is a channel access method used by some mobile-phone carriers that allows multiple users to share the same radio frequencies using spread spectrum signals.
DCS1800. Digital Cellular Service version of GSM operating in the 1700 and 1800 MHz bands.
EDGE. Enhanced Data Rates for GSM Evolution, a third-generation (3G) version of GSM.
EGSM900. The Extended GSM 900 MHz band.
FDD. Frequency-division duplexing, a communications protocol that uses different carrier frequencies for transmitt
ing and receiving.
FM. The broadcast frequency modulation band.
GMSK. Gaussian minimum shift keying, a continuous-phase frequency-shift keying modulation scheme used for GSM communications.
GSM. Global System for Mobile communications, the most popular mobile phone standard.
GSM850. A GSM version operating in the 800 MHz band.
PCS1900. Personal Communications Service version of GSM operating in the 1800 and 1900 MHz bands.
QPSK. Quadrature phase-shift keying. A modulation technique used in CDMA systems.
Triplexer. A filtering device to provide isolation between communications and GPS circuits when sharing an antenna.
W-CDMA. Wideband CDMA, an enhanced, 3G version of CDMA.
Wi-Fi 802.11b/g. Wi-Fi describes a standard class of wireless local area network (WLAN) protocols based on the IEEE 802.11 standards operating primarily in the 2.4 GHz band.
FURTHER READING
• Mobile Phone Development
“The Smartphone Revolution” by F. van Diggelen in GPS World, Vol. 20, No. 12, December 2009, pp. 36–40.
• Signal Compatibility Issues
“Jammers – the Enemy Inside!” by M. Phocas, J. Bickerstaff, and T. Haddrell in Proceedings of ION GNSS 2004, the 17th International Technical Meeting of the Satellite Division of The Institute of Navigation, Long Beach, California, September 21–24, 2004, pp. 156–165.
• High Sensitivity GPS Receiver
“A Single Die GPS, with Indoor Sensitivity – the NXP GNS7560” by T. Haddrell, J.P. Bickerstaff, and M. Conta in Proceedings of ION GNSS 2008, the 21st International Technical Meeting of the Satellite Division of The Institute of Navigation, Savannah, Georgia, September 16–19, 2009, pp. 1201–1209.
• Mobile Phone GPS Antennas
“A Compact Broadband Planar Antenna for GPS, DCS-1800, IMT-2000, and WLAN Applications” by R. Li, B. Pan, J. Laskar, M.M. Tentzeris in IEEE Antennas and Wireless Propagation Letters, Vol. 6, 2007, pp. 25–27 (doi:10.1109/LAWP.2006.890754).
“Getting into Pockets and Purses: Antenna Counters Sensitivity Loss in Consumer Devices” by B. Hurte and O. Leisten in GPS World, Vol. 16, No. 11, November 2005, pp. 34–38.
“Miniature Built-in Multiband Antennas for Mobile Handsets” by Y.X. Guo, M.Y.W. Chia, and Z.N. Chen in IEEE Transactions on Antennas and Propagation, Vol. 52, No. 8, August 2004, pp. 1936–1944 (doi: 10.1109/TAP.2004.832375).
“Mobile Handset System Performance Comparison of a Linearly Polarized GPS Internal Antenna with a Circularly Polarized Antenna” by V. Pathak, S. Thornwall, M. Krier, S. Rowson, G. Poilasne, L. Desclos in Proceedings of IEEE Antennas and Propagation Society International Symposium 2003, Columbus, Ohio, June 22-27, 2003, Vol. 3, pp. 666–669 (doi:10.1109/APS.2003.1219935).
Planar Antennas for Wireless Communications by K.L. Wong, published by John Wiley & Sons, New York, 2003.
• Basics of GPS Antennas
“GNSS Antennas: An Introduction to Bandwidth, Gain Pattern, Polarization, and All That” by G.J.K. Moernaut and D. Orban in GPS World, Vol. 20, No. 2, February 2009, pp. 42–48.
“A Primer on GPS Antennas” by R.B. Langley in GPS World, Vol. 9, No. 7, July 1998, pp. 50–54.










