No audio available for this content.
On Oct. 24, 2019, representatives from 11 nations met in Moscow and agreed to a “Radio Navigation Development Plan for Participating Commonwealth of Independent States for 2019 to 2024.” The Russian version is here; a version in English produced by Google Translate can be found here.
Most government documents like this, regardless of the country, tend to be more overviews of current systems vice real plans for a way forward. In this case, though, this seems to be much more of a plan. It documents existing systems, recent accomplishments, user needs, and the upgrades and changes required to meet those needs.
The plan makes clear Russia’s significant concern with GNSS signal disruption (one might opine this is justified as they disrupt the signals so much themselves). As a result, the plan dedicates significant space to combatting disruption and making users more resilient by integrating space and terrestrial systems into a more robust and resilient PNT architecture.
It also seems to confirm a mobile terrestrial PNT capability, likely for military use, that has received little public attention.
Note on Translation and Terminology: The copy of the plan we found was in Russian. We used Google Translate to create an English version. One translation issue that we noticed was several variations of the way the Russian terrestrial Loran PNT system is described. The Russian Loran system is named “Chayka,” literally “Seagull” in English. References in the translated version to “Chaika,” “Loran,” “Laurent,” “Seagull” and “Tropic” are all some version of “Loran.”
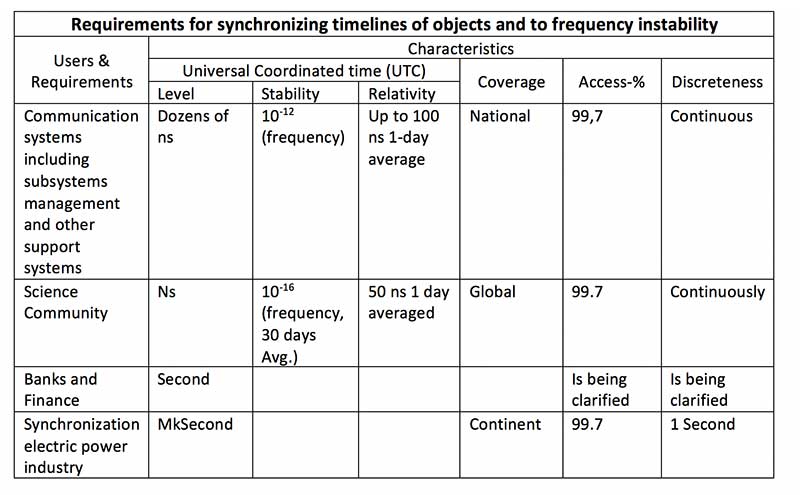
User requirements
Early on the plan provides a detailed discussion of user requirements for each mode of transportation and for timing users. This user focus continues throughout the document. The table for timing users did not transition well during conversion of the document to English and is reproduced below:
Strategic approach
While not overtly stated, one can see that Russia and its Commonwealth of Independent States (CIS) partners have a very strategic view of PNT and how they can leverage it.
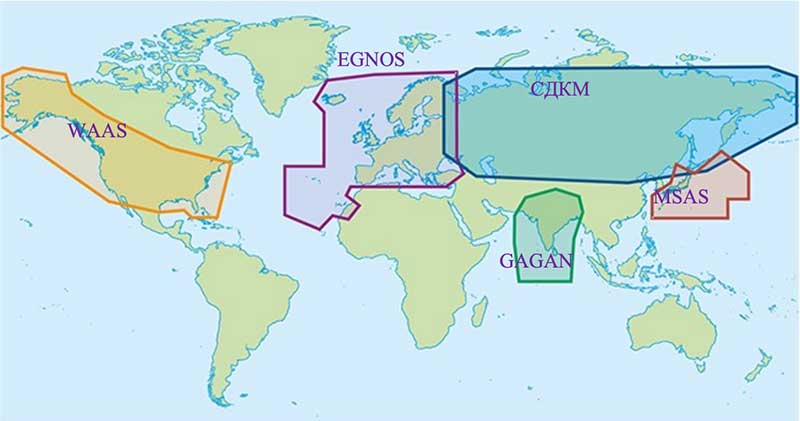
This graphic from the plan speaks volumes. Russian/CIS domestic PNT covers 14% of the earth’s land mass (compared to 6.6% for the U.S.). A good portion of China’s belt and road passes through. Resilient and robust navigation is going to be especially important for a wide variety of reasons.
Concerns about i nterference
The plan discusses GNSS interference at length, listing 13 operational electronic systems (radars, TV channels, etc.) with emissions that could impact reception.
Among the recommendations to counter interference, the plan suggests creation of a system to monitor GNSS frequencies and identify disruptions, use of multiple GLONASS frequencies, and integrating GLONASS, GPS and terrestrial systems within users’ receivers.
“Integration of terrestrial and space RNS will allow creating separate navigation areas superior in technical the characteristics of each of its constituent systems…One of the ways to integrate ground and space RNS is integration of systems like “Seagull” [Loran] and GLONASS. Integrated systems “Seagull” / GLONASS may in the future used as the main systems for route stages navigation.”
Integration of inertial and Loran sensors with GNSS has already been done for some “consumer equipment.” The plan also says that at least one version of Seagull/Loran is being modernized.
Loran and GNSS
Russia’s version of Differential GNSS and Eurofix is done using Loran towers and signals.
In the Russian Federation and the Republic of Belarus there is a ground navigation base that supports control technology transmission corrective information from regional differential GNSS satellite subsystems using Eurofix technology. In Russian Federation, this base is presented in the form of pulse-phase RNS types “The Seagull,” “Tropic-2V” and “Tropic-2C.” Modernization in progress a similar station located in the city of Slonim of the Republic of Belarus.
Some of the advantages of this are listed as coverage of a large area (600- 2,200 km) at relatively low cost, improved channel uptime and availability, data transmission in urban and mountainous areas, and that Loran and GLONASS/GPS are complementary and provide backups for each other.
It also points out that Loran and GNSS are mutually supportive in other ways:
GNSS location determinations can be used to calibration of readings RSDN and compensate for errors due to the propagation of radio wave. In turn the data Laurent-C/Seagull can be used to monitor the integrity of satellite RNS.
Mobile Loran/Scorpio
One system that we have heard very little about in the last five years is Russia’s “Scorpio” or “Skorpion.” It was initially assessed by a US Army journal as a mobile, military PNT system, for space-denied battle.
This document shows it as an on-going Ministry of Defense research and development modernization program. Also, as a mobile form of the Tropic-2P variant of Seagull/Loran.
In the period until 2020, a planned replacement of mobile long-range radio navigation systems “Tropic-2P” to the information system coordinate-temporal support “Scorpio”. As part of the complex equipment there are local control and correction stations, which can significantly improve the accuracy of determining coordinates consumers.
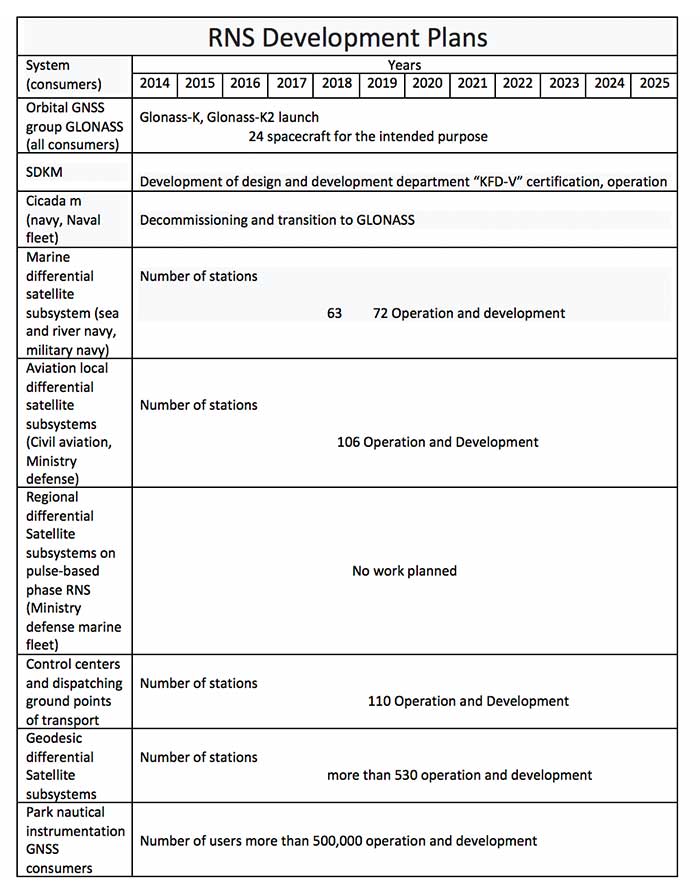
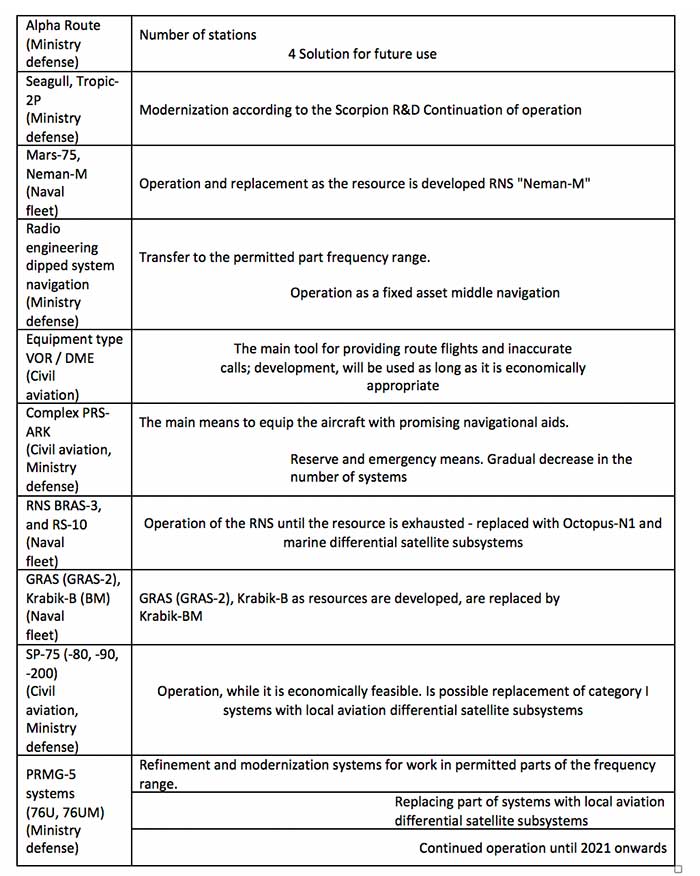
The way forward
At over a hundred pages, this plan has a lot of information. It includes a table of 19 different navigation systems maintained by the government and the plan for each. This table also suffered when the document was transformed into the English version. The manual re-recreation is below: