No audio available for this content.
Smaller and Better
By Reza Movahedinia, Julien Hautcoeur, Gyles Panther and Ken MacLeod

THE ANTENNA. This crucial component of any radio transmitting or receiving system has a history that actually predates the invention of radio itself. The first antennas were used by Princeton professor Joseph Henry (after whom the unit of inductance is named) to demonstrate the magnetization of needles by a spark generator. But it was the experiments of Heinrich Hertz in Germany in 1887 that initiated the development of radio transmitters and receivers and the antennas necessary for launching and capturing electromagnetic waves for practical purposes. It was Hertz who pioneered the use of tuned dipole and loop antennas–basic antenna structures we still use today. As communication systems evolved using different parts of the radio spectrum from very low frequencies, through medium-wave frequencies, to high frequencies (shortwave), and to very high frequencies and ultra-high frequencies, and beyond, so did their antennas.
There have been significant advances in the design of antennas over the years to improve their bandwidth, beamwidth, efficiency and other parameters. In fact, antenna development, going all the way back to the first antennas, has been one of continuous innovation.
GNSS antennas are no different. The antennas for the first civil GPS receivers were bulky affairs. Researchers at the Massachusetts Institute of Technology initially introduced the Macrometer V-1000 in 1982, and Litton Aero Service subsequently commercialized it. It used a crossed-dipole antenna element on a 1-meter square aluminum panel and weighed 18 kilograms. The Jet Propulsion Laboratory’s demonstration GPS receiver, unveiled around the same time, used a small steerable parabolic dish that had to be sequentially pointed at GPS satellites. Both of these antennas gave way to more practical designs. Also introduced in 1982 was the Texas Instruments TI 4100, also known as the Navstar Navigator. This dual-frequency receiver used a conical spiral antenna to provide the wide bandwidth needed to cover both the L1 and L2 frequencies used by GPS.
Subsequently, in the mid- to late-1980s, GPS and GLONASS antennas using microstrip patches were introduced for both single- and dual-frequency signal reception. The basic designs introduced then are still with us and are used for single- and multiple-frequency GNSS receivers. Miniature versions are used in some mass-market handheld receivers and for receivers in drone flight control systems. Patch antennas have also been used as elements in survey-grade antennas. A number of other GNSS antenna topologies have been developed including helices and planar spiral designs. Antennas designed for high-precision applications often integrate a ground-plane structure of some kind into the structure such as choke rings.
You might think after more than 30 years of GNSS technology development, that there is nothing new to be expected in GNSS antenna development. You would be wrong. In this GPS World 30th anniversary issue Innovation column, we look at the design and performance of an antenna that offers high performance even in challenging environments in a relatively small package. It is appropriate that it is unveiled in this column. After all, Webster’s Dictionary has defined innovation as “the act of innovating or effecting a change in the established order; introduction of something new.” This antenna might very well be a game changer.
Global navigation satellite systems (GNSS) have continued to evolve and have become critical infrastructure for all of society. Starting with the awesome engineering feat of the U.S. Global Positioning System and then the more recently developed constellations from other nations, we now have available refined signal structures with ever-improving positioning, navigation and timing accuracy.
Expanding use cases has led to the design of GNSS antennas optimized for many different applications. However, new antenna design commonly requires more than simple modifications to existing GPS antenna technologies. Design agility is needed to meet requirements such as wider bandwidth, sculpted radiation patterns (we frequently talk about radiation characteristics even for a receiving antenna assuming antenna reciprocity), optimized/reduced size, better efficiency, lower noise figure, or improvements in the more esoteric parameters such as axial ratio (AR) and phase-center variation (PCV). Nothing changes the widely unappreciated fact that the antenna is the most critical element in precision GNSS systems.
In this article, we report on the research and commercial development of a high-performance GNSS antenna by Tallysman, designated “VeroStar.” The VeroStar sets a new performance standard for an antenna of this type and supports reception of the full GNSS spectrum (all constellations and signals) plus L-band correction services. The antenna combines exceptional low-elevation angle satellite tracking with a very high-efficiency radiating element. Precision manufacturing provides a stable phase-center offset (PCO) and low PCV from unit to unit. The performance, compact size and light weight of the VeroStar antenna element make it a good candidate for modern rover and many other mobile GNSS applications.
DESIGN OBJECTIVES
The design of an improved, high-level GNSS antenna requires consideration of characteristics such as low-elevation angle tracking ability, minimal PCV, antenna efficiency and impedance, axial ratio and up-down ratio (UDR), antenna bandwidth, light weight, and a compact and robust form factor.
Low-Elevation Angle Tracking. Today’s professional GNSS users have widely adopted the use of precise point positioning (PPP) including satellite broadcast of the PPP correction data. PPP correction data is broadcast from geostationary satellites, which generally hover at low-elevation angles for many densely populated regions such as Europe and much of North America. The link margin of L-band signals is typically minimal, so that improved gain at these elevation angles is an important attribute. This issue is exacerbated at satellite beam edges and northern latitudes where the link margin is further challenged — a difference of just 1 dB in antenna gain or antenna noise figure can make a big difference in correction availability. A key design parameter in this respect is the antenna G/T, being the ratio, expressed in dB per kelvin, of the antenna element gain divided by the receiver system noise temperature, typically determined by the antenna noise figure. The G/T objective for this antenna was –25.5 dB/K at a 10-degree elevation angle.
The gain of most GNSS antenna elements, such as patches and crossed dipoles, rolls off rapidly as the elevation angle decreases toward the horizon. The polarization also becomes linear (rather than circularly polarized) at the lower elevation angles, due to the existence of a ground plane, necessary to increase gain in the hemisphere above the antenna. Improved gain close to the horizon also increases the ability of the receiver to track low-elevation-angle satellites with a concomitant improvement in the dilution of precision parameters (DOPs; a series of metrics related to pseudorange measurement precision).
Most of the commercially available GNSS rover antennas have a peak gain at zenith of about 3.5 dBic to 5 dBic with a roll-off at the horizon of 10–12 dB (dBic refers to the antenna gain referenced to a hypothetical isotropic circularly polarized antenna). Typically, this provides an antenna gain at the horizon, at best, of about –5 dBic, which is insufficient for optimized L-band correction usage. In some studies, different antenna types such as helical elements have been proposed to overcome this issue. However, their cylindrical shape and longer length makes them unsuitable for many rover applications. Furthermore, the helix suffers from back lobes that can make the antenna more susceptible to reception of multipath signals from below the upper hemisphere of the antenna.
In the VeroStar design, we used wide-bandwidth radiating elements (referred to here as “petals”) that surround a distributed feed network. The petal design is important to achieve superior right-hand circularly polarized (RHCP) gain at low-elevation angles.
Tight Phase-Center Variation. The phase center of an ideal antenna is a notional point in space at which all signals are received or transmitted from, independent of the frequency or elevation or azimuth angle of the signal incidence. The phase centers of real-life antennas are less tidy, and the PCV is a measure of the variation of the “zero” phase point as a function of frequency, elevation and azimuth angles. Correction data for phase-center variation is commonly encoded in a standardized antenna exchange format or Antex file, which can be applied concurrently for precision applications.
The azimuthal orientation of rover antennas is typically unknown, so that errors for specific orientations of the antenna in the horizontal plane cannot be accounted for. The PCV correction data provided in an Antex file is usually provided as a function of elevation angle and frequency, but with averaged azimuth data for each elevation angle and frequency entry (noazi corrections). Thus, corrections can be applied for each frequency and elevation angle, but errors due to the variation in the azimuthal PCV cannot be corrected in the receiver. For real-time kinematic (RTK) systems, the net system error is the root-mean-square sum of the base and rover antenna PCVs. It is usually possible to accommodate larger base-station antennas, which can commonly provide PCVs approaching +/- 1 mm (such as those from Tallysman VeraPhase or VeraChoke antennas). In this case, the accuracy of the combined system is largely determined by the PCV of the smaller rover GNSS antenna. Thus, even with correction data, azimuthal symmetry in the rover antenna is key. In the VeroStar, this was addressed by obsessive focus on symmetry for both the antenna element structure and the mechanical housing design.
Antenna Efficiency and Impedance. Antenna efficiency can be narrowly defined in terms of copper losses of the radiating elements (because copper is not a perfect conductor), but feed network losses also contribute so that the objective must be optimization of both. Physically wide radiating elements are a basic requirement for wider bandwidth, and copper is the best compromise for the radiator metal (silver is better, but expensive and with drawbacks). This is true in our new antenna, which has wide radiating copper petals.
However, the petals are parasitic resonators that are tightly coupled to a distributed feed network, which in itself is intrinsically narrowband. The resulting wide bandwidth response results from the load on the feed network provided by the excellent wideband radiation resistance of the petals.
This arrangement was chosen because the resulting impedance at the de-embedded antenna feed terminals is close to the ideal impedance needed (50 ohms), thus requiring minimal impedance matching. The near ideal match over a wide bandwidth is very important because it allowed the impedance to be transformed to ideal using a very short transmission line (less than one-quarter of a wavelength), which included an embedded infinite balun (a balun forces unbalanced lines to produce balanced operation).
Each of the orthogonal exciter axes are electrically independent and highly isolated electrically (better than –30 dB), even with the parasitic petal coupling. To achieve the desired circular polarization, the two axes are then driven independently in phase quadrature (derived from the hybrid couplers).
Thus, the inherently efficient parasitic petals combined with the absolutely minimized losses of the distributed feed network has resulted in a super-efficient antenna structure that will be difficult to improve upon.
Axial and Up-Down Ratio. AR characterizes the antenna’s ability to receive circularly polarized signals, and the UDR is the ratio of gain pattern amplitude at a positive elevation angle (α) to the maximum gain pattern amplitude at its mirror image (–α). Good AR and UDR across the full bandwidth of the antenna ensure the purity of the reception of the RHCP GNSS signals and multipath mitigation. GNSS signals reflected from the ground, buildings or metallic structures such as vehicles are delayed and their RHCP purity is degraded with a left-hand circularly polarized (LHCP) component. Because the VeroStar antenna has more gain at low-elevation angles, a very low AR and a high UDR are even more important for mitigating multipath interference. The design objective was an AR of 3 dB or better at the horizon.
A Light, Robust and Compact Design. The user community demands ever smaller antennas from antenna manufacturers, but precision rover antennas are typically required to receive signals in both the low (1160 to 1300 MHz) and high (1539 to 1610 MHz) GNSS frequency bands. An inescapable constraint limits the bandwidth of small antennas, so that full-bandwidth (all GNSS signals) rover antennas are unavoidably larger. To date, probably the smallest, high performance all-band antenna was the original Dorne & Margolin C146-XX-X (DM) antenna, which was in its time a tour-de-force.
The overall objective for our antenna was to design a small and light-weight radiating element (given the full bandwidth requirement) with a ground-plane size of around 100 millimeters, element height of 30 millimeters or lower, and a weight of 100 grams or less. Ideally, it would be possible to build a smaller version, perhaps with a degree of compromised performance. The applications envisaged for the VeroStar included housed antennas (such as for RTK rovers) and a lightweight element suitable for mobile applications such as drones or even cubesats.
ANTECEDENTS
The central goal of this project was a precision antenna with a broad beamwidth and a good AR combined with a very tight PCV. The objective was to provide for reception of signals from satellites at low-elevation angles, particularly necessary for reception of L-band correction signals, which can be expected to be incident at elevation angles of 10 degrees to 50 degrees above the horizon.
A starting point for this development was an in-depth study of the well-known DM antenna. This antenna has been used for decades in GPS reference stations (usually in choke-ring antennas). It exhibits a higher gain at low-elevation angles (about –3 dBic at the horizon) compared to other antennas on the market (typically –5 dBic or less) and fairly good phase-center stability in a compact design. The antenna structure consists of two orthogonal pairs of short dipoles above a ground plane, with the feeds at the midpoint of the dipoles, as shown in FIGURE 1(a). The antenna can be considered in terms of the ground-plane image, replacing the ground plane with the images of the dipole as shown in FIGURE 1(b). The antenna structure then takes on the form of a large uniform current circular loop similar to the Alford Loop antenna, developed at the beginning of World War II for aircraft navigation.
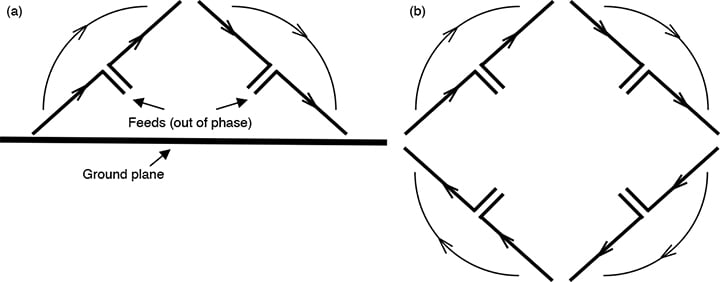
But the DM antenna does suffer from some drawbacks. By modern standards, the feed network is complex and lossy with costly fabrication, which affects repeatability and reliability. The AR at the zenith is marginal (up to 1.5 dB) and further degrades to 7 dB at the horizon, a factor that becomes less relevant in a choke-ring configuration where the DM element is the most commonly used. However, we took our inspiration from the DM structure and give a nod to its original developers.
The structure of the VeroStar antenna is shown in FIGURE 2(a). It consists of bowtie radiators (petals) over a circular ground plane. The petals are coupled to a distributed feed network comprised of a simple low-loss crossed dipole between the petals and the ground plane. The relationship between the petals and the associated feed system provides a current maximum at the curvature of the petals instead of at the center of the antenna as seen in FIGURE 2(b), and in this respect achieves a current distribution similar to that of the DM element.

This arrangement increases the gain at low-elevation angles, which greatly improves the link margin for low-elevation angle GNSS and L-band satellites. The circular polarization of the antenna at low-elevation angles can be significantly improved by optimizing the petal’s dimensions such as its height, width and angle with respect to the ground plane. This solves the problem of asymmetry between the electric and magnetic field planes of the antenna radiation pattern, which usually degrades the AR at low-elevation angles. Based on the studies conducted in our project, it was found that the bowtie geometry of the radiators, as well as its coupling to the feeding network, can improve both the impedance and AR bandwidth. By these means, we were able to produce a very wideband, low-loss antenna covering the entire range of GNSS frequencies from 1160 to 1610 MHz. The matching loss associated with the feed network is under 0.3 dB, and the axial ratio remains around 0.5 dB at the zenith and is typically under 3 dB at the horizon over the whole GNSS frequency range.
In the early stages of the project, we thought that just four petals would be adequate for our purpose. However, as we progressed with further experimentation and simulation, it became clear that increasing the number of petals substantially improved symmetry, but at the cost of complexity. Ultimately, we determined that eight petals provided considerably better symmetry than four petals with an acceptable compromise with respect to feed complexity.
MEASUREMENTS
The far-field characteristics of the VeroStar antennas were measured using the Satimo anechoic chamber facilities at Microwave Vision Group (MVG) in Marietta, Georgia, and at Syntronic R&D Canada in Ottawa, Ontario. Data were collected from 1160 to 1610 MHz to cover all the GNSS frequencies.
Radiation Patterns and Roll-Off. The measured radiation patterns at different GNSS frequencies are shown in FIGURE 3. The radiation patterns are normalized, showing the RHCP and LHCP gains on 60 azimuth cuts three degrees apart. The LHCP signals are significantly suppressed in the upper hemisphere at all GNSS frequencies. The difference between the RHCP gain and the LHCP gain ranges from 31 dB to 43 dB, which ensures an excellent discrimination between the signals. Furthermore, for other upper hemisphere elevation angles, the LHCP signals stay 22 dB below the maximum RHCP gain and even 28 dB from 1200 to 1580 MHz.
Figure 3 also shows that the antenna has a constant amplitude response to signals coming at a specific elevation angle regardless of the azimuth angle. This feature yields an excellent PCV, which will be discussed later.
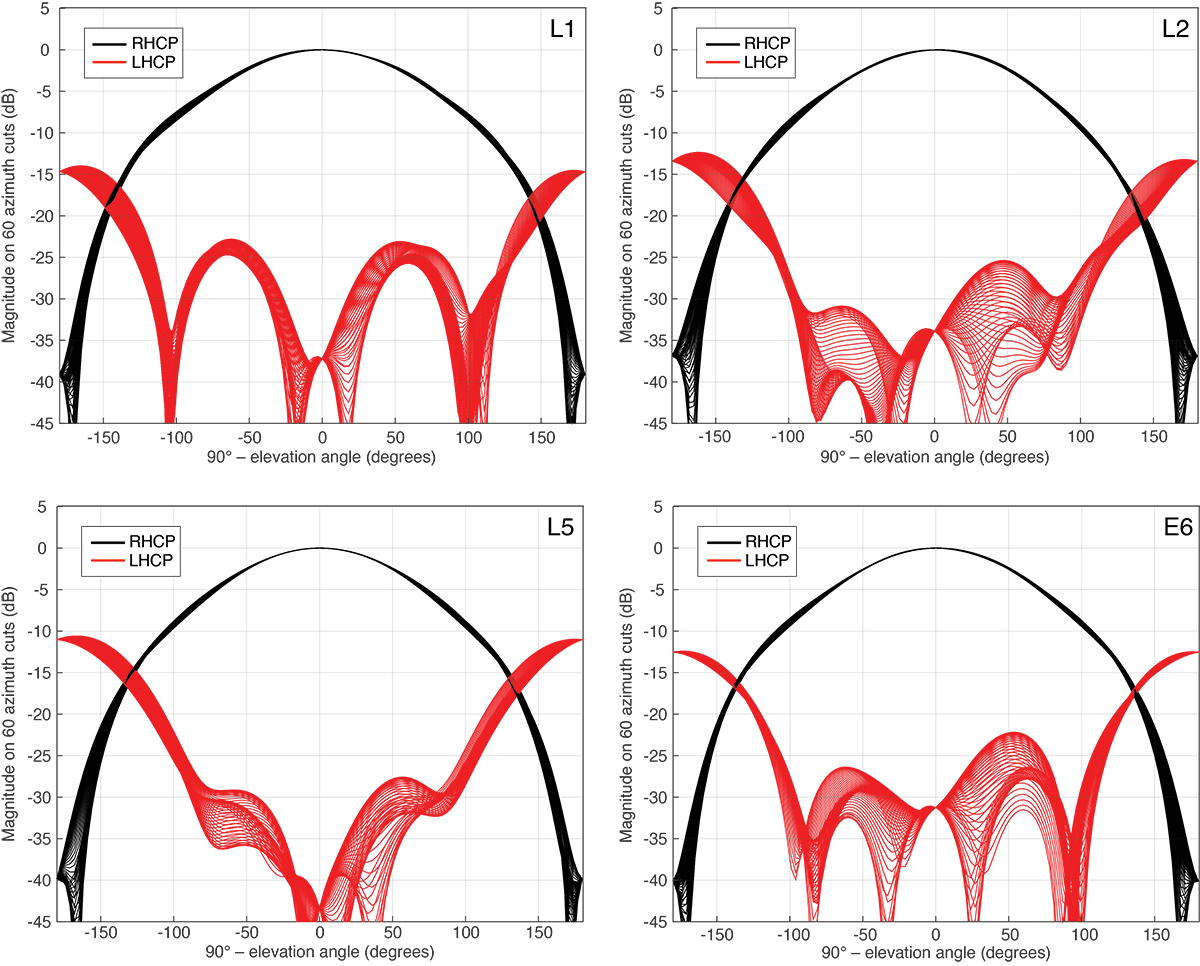
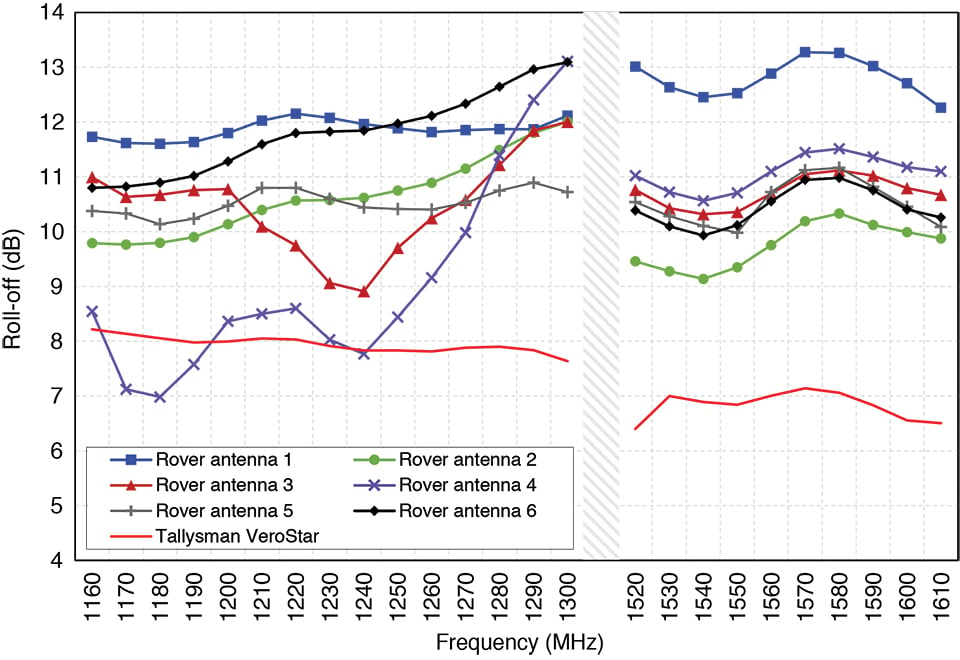
FIGURE 4 shows a comparison of the VeroStar roll-off (that is, lower gain at the horizon) with six other commercially available rover antennas measured during the same Satimo session. The VeroStar roll-off is significantly lower than the other rover antennas. The amplitude roll-off from the VeroStar boresight (zenith) to horizon is between 6.5 to 8 dB for all the frequency bands.
High gain at low-elevation angles (low roll-off) will cause the antenna to be more susceptible to multipath interference. Multipath signals are mainly delayed LHCP and RHCP signals. If they arrive at high-elevation angles, there is no issue because the AR of the antenna is low at those angles — thus there will be minimal reception of the multipath signals. However, in conventional antennas, low-elevation-angle multipath degrades observations due to the poor AR performance and low UDR. At lower elevation angles, our antenna has exceptional AR performance and good UDR, which significantly reduces multipath interference. Measurements in a high multipath environment were performed with the antenna and compared to other commercial rover antennas. The measurements show that the phase noise at a 5-degree elevation angle is approximately 6 to 10 millimeters over all GNSS frequencies. The other antennas perform similarly, but have a higher roll-off. This shows that the VeroStar provides a strong signal at low-elevation angles and also has a high level of multipath mitigation performance.
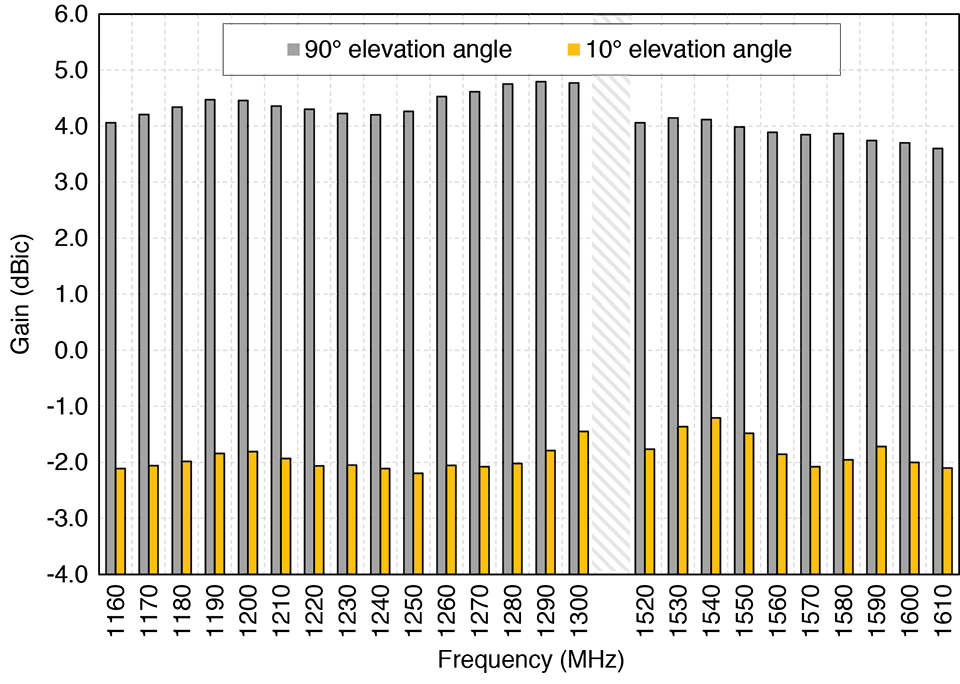
Antenna Gain and Efficiency. FIGURE 5 shows the RHCP gain of our antenna at the zenith and at a 10-degree elevation angle for all GNSS frequencies. The measurements show that the antenna exhibits a gain range at the zenith from 4.1 dBic at 1160 MHz to 3.6 dBic at 1610 MHz. The antenna gain at a 10-degree elevation angle varies from –1.45 dBic to –2.2 dBic and is maximum in the frequency range used to broadcast L-band corrections (1539 to 1559 MHz). The radiation efficiency of the antenna is between 70 to 89 percent over the full bandwidth. This corresponds to an inherent (“hidden”) loss of only 0.6 to 1.5 dB, including copper loss, feedline, matching circuit and 90-degree hybrid coupler losses. This performance is a substantial improvement over other antenna elements such as spiral antennas, which exhibit an inherent efficiency loss of close to 4 dB at the lower GNSS frequencies. With the integration of wideband pre-filtering as well as a low-noise amplifier (LNA), we measured a G/T of –25 dB/K at a 10-degree elevation angle.
Axial Ratio. The AR values of the VeroStar antenna at different elevation angles are shown in FIGURE 6. The antenna has exceptional AR performance over all GNSS frequency bands and at all elevation angles, with the value no greater than 3.5 dB. This increases the antenna’s ability to reject LHCP signals caused by reflections from nearby cars or buildings. Therefore, the susceptibility of the antenna to multipath interference is greatly reduced.
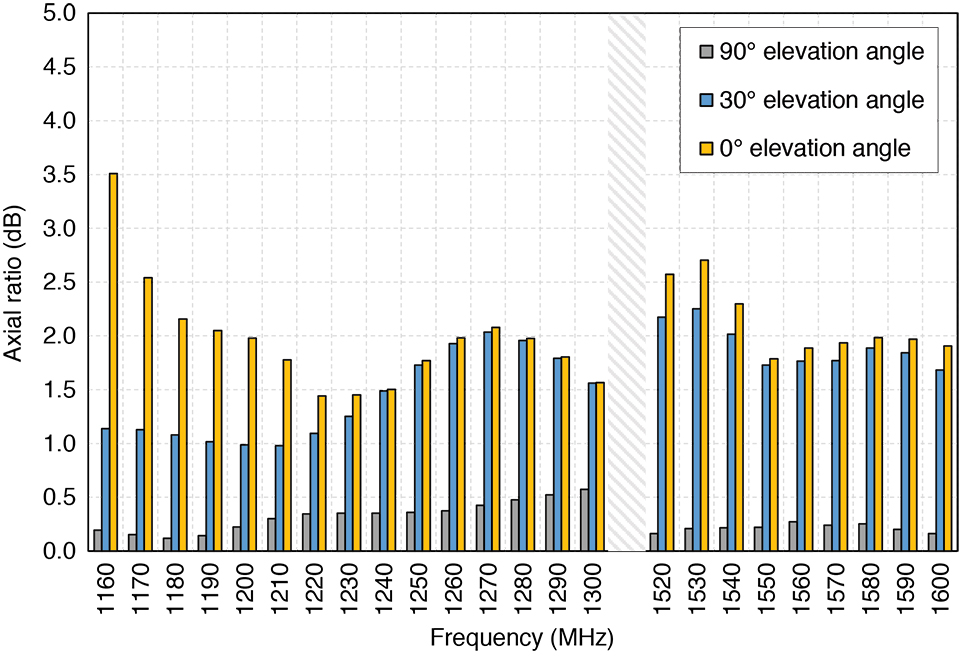
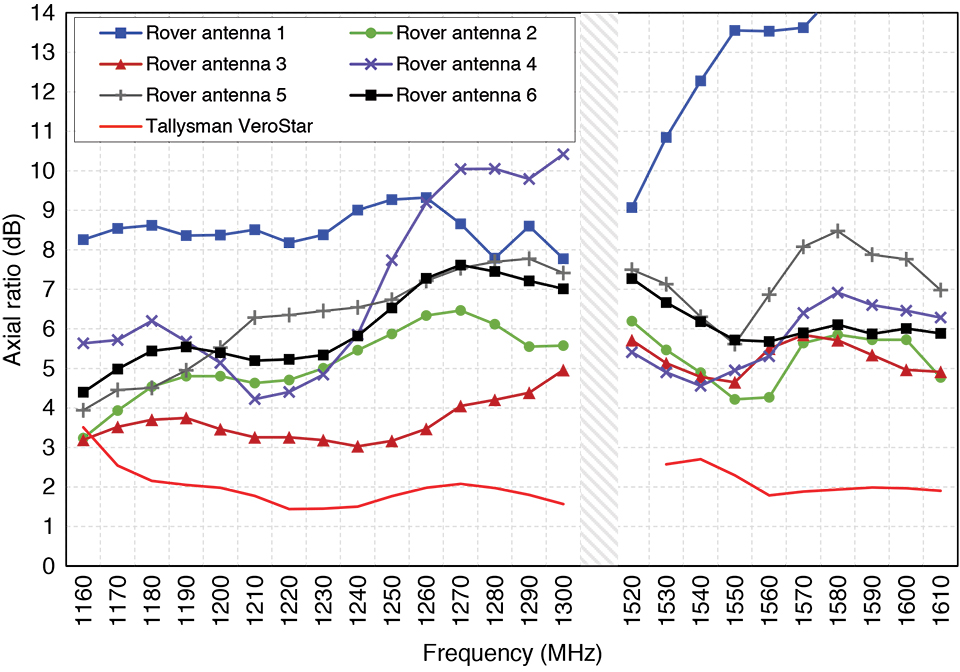
In FIGURE 7, the AR performance of the antenna at the horizon is compared to six commercial rover antennas. The VeroStar antenna has an average AR of 2 dB at the horizon (competitive antennas are typically around 6 dB), showing its ability to track pure RHCP signals and enabling outstanding low-elevation-angle multipath mitigation.
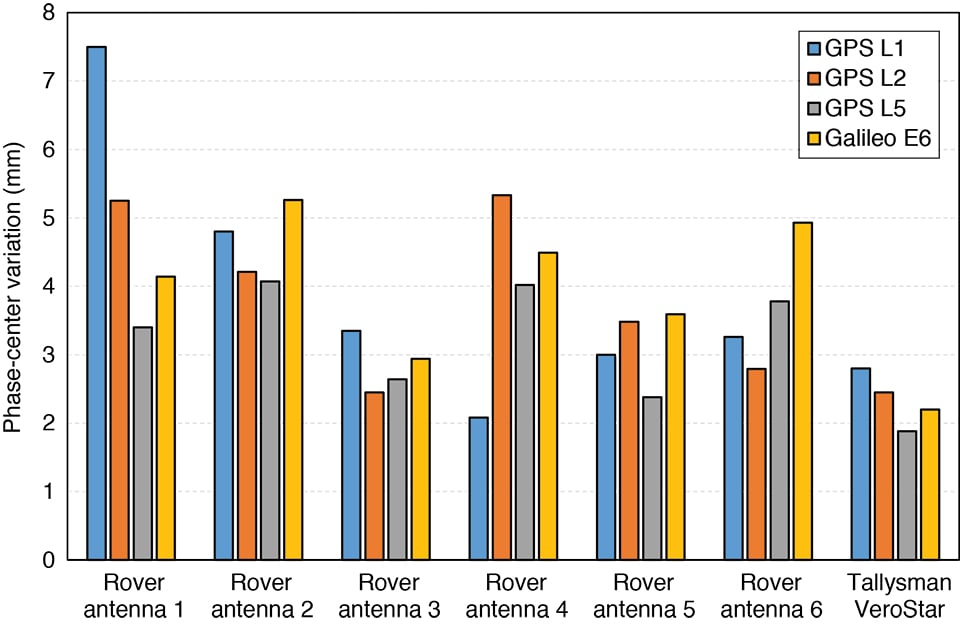
Phase-Center Variation. We developed Matlab code to estimate the PCV from the measured radiation pattern. FIGURE 8 shows the maximum PCV of the VeroStar antenna and six commercial rover antennas for four common GNSS frequencies. It can be seen that the antenna has a maximum total PCV of less than 2.9 millimeters for all frequency bands, which is less than the other commercially available rover antennas tested. Furthermore, the PCV of the antenna does not vary significantly with frequency. This comparison confirms the exceptional low PCV of our antenna.
LOW-NOISE AMPLIFIER DESIGN
The best achievable carrier-to-noise-density ratio (C/N0) for signals with marginal power flux density is limited by the efficiency of each of the antenna elements, the gain and the overall receiver noise figure. This can be quantified by the G/T parameter, which is usually dominated by the noise figure of the input LNA. In the LNA design for our antenna, the received signal is split into the lower GNSS frequencies (from 1160 to 1300 MHz) and the higher GNSS frequencies (from 1539 to 1610 MHz) in a diplexer connected directly to the antenna terminals and then pre-filtered in each band. This is where the high gain and high efficiency of the antenna element provides a starting advantage, since the unavoidable losses introduced by the diplexer and filters are offset by the higher antenna gain, and this preserves the all-important G/T ratio.
That being said, GNSS receivers must accommodate a crowded RF spectrum, and there are a number of high-level, potentially interfering signals that can saturate and desensitize GNSS receivers. These signals include, for example, mobile-phone signals, particularly Long-Term Evolution (LTE) signals in the 700-MHz band, which are a hazard because of the potential for harmonic generation in the GNSS LNA. Other potentially interfering signals include Globalstar (1610 to 1618.25 MHz), Iridium (1616 to 1626 MHz) and Inmarsat (1626 to 1660.5 MHz), which are high-power communication satellite uplink signals close in frequency to GLONASS signals. The VeroStar LNA design is a compromise between ultimate sensitivity and ultimate interference rejection.
A first defensive measure in the LNA is the addition of multi-element bandpass filters at the antenna element terminals (ahead of the LNA). These have a typical insertion loss of 1 dB because of their tight passband and steep rejection characteristics. However, the LNA noise figure is increased approximately by the additional filter-insertion loss. The second defensive measure in the design is the use of an LNA with high linearity. This is achieved without any significant increase in LNA power consumption, using LNA chips that employ negative feedback to provide well-controlled impedance and gain over a very wide bandwidth. Bear in mind that while an antenna installation might initially be determined to have no interference, subsequent introduction of new telecommunication services may change this, so interference defense is prudent even in a quiet radio-frequency environment. A potentially undesirable side effect of tight pre-filters is the possible dispersion that can result from variable group delay across the filter passband. Thus, it is important to include these criteria in the selection of suitable pre-filters. The filters in our LNA give rise to a maximum variation of less than 10 nanoseconds in group delay over both the lower GNSS frequencies (from 1160 to 1300 MHz) and the higher GNSS frequencies (from 1539 to 1610 MHz).
CONCLUSION
In this article, we have described the performance of a novel RHCP antenna optimized for modern multi-constellation and multi-frequency GNSS rover applications. We have developed a commercially viable GNSS antenna with superior electrical properties. The VeroStar antenna has high sensitivity at low elevation angles, high efficiency, very low axial ratio and high phase-center stability. The lightweight and compact antenna element is packaged in several robust housings designed and built for durability to stand the test of time, even in harsh environments.
The VeroStar antenna has sufficient bandwidth to receive all existing and currently planned GNSS signals, while providing high performance standards. Testing of the antenna has shown that the novel design (curved petals coupled to crossed driven dipoles associated with a high performance LNA) has excellent performance, especially with respect to axial ratios, cross polarization discrimination and phase-center variation. These features make the VeroStar an ideal rover antenna where low-elevation angle tracking is required, providing users with new levels of positional precision and accuracy.
ACKNOWLEDGMENTS
Tallysman Wireless would like to acknowledge the partial support received from the European Space Agency and the Canadian Space Agency.
REZA MOVAHEDINIA is a research engineer with Tallysman Wireless, Ottawa, Ontario, Canada. He has a Ph.D. degree in electrical and computer engineering from Concordia University, Montreal, Quebec, Canada.
JULIEN HAUTCOEUR is the director of GNSS product R&D at Tallysman Wireless. He received a Ph.D. degree in signal processing and telecommunications from the Institute of Electronics and Telecommunications of Université de Rennes 1, Rennes, France.
GYLES PANTHER is president and CTO of Tallysman Wireless. He holds an honors degree in applied physics from City University, London, U.K.
KEN MACLEOD is a product-line manager with Tallysman Wireless. He received a Bachelor of Science degree from the University of Toronto.
FURTHER READING
- GNSS Antennas in General
“Antennas” by M. Maqsood, S. Gao and O. Montenbruck, Chapter 17 in Springer Handbook of Global Navigation Satellite Systems edited by P.J.G. Teunissen and O. Montenbruck, published by Springer International Publishing AG, Cham, Switzerland, 2017.
GPS/GNSS Antennas by B. Rama Rao, W. Kunysz, R. Fante and K. McDonald, published by Artech House, Boston and London, 2013.
“GNSS Antennas: An Introduction to Bandwidth, Gain Pattern, Polarization, and All That” by G.J.K. Moernaut and D. Orban in GPS World, Vol. 20, No. 2, Feb. 2009, pp. 42–48.
“A Primer on GPS Antennas” by R.B. Langley in GPS World, Vol. 9, No. 7, July 1998, pp. 50–54.
- Tallysman VeraPhase GNSS Antenna
Static Testing and Analysis of the Tallysman VeraPhase VP6000 GNSS Antenna by R.M. White and R.B. Langley, a report prepared for Tallysman Wireless Inc., Feb. 2018.
“Evolutionary and Revolutionary: The Development and Performance of the VeraPhase GNSS Antenna” by J. Hautcoeur, R.H. Johnston and G. Panther in GPS World, Vol. 27, No. 7, July 2016, pp. 42–48.
- The Alford Loop
“Ultrahigh-frequency Loop Antennas” by A. Alford and A.G. Kandoian in Electrical Engineering, Vol. 59, No. 12, Dec. 1940, pp. 843–848. doi: 10.1109/EE.1940.6435249.








