Listen to this content
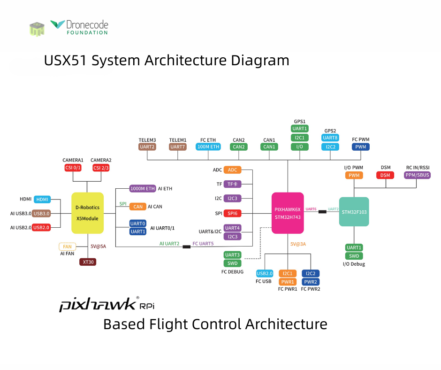
The USX51 Computing Power Flight Controller by UTMSYS is a system architecture that combines the Pixhawk 6X flight controller with the D Robotics RDK X5 edge-computing module.
According to the development team, the goal of the USX51 platform is not only to provide hardware, but to simplify complex UAV system integration for developers, research teams, and robotics engineers working on real world deployment scenarios.
The USX51 system integrates Pixhawk 6X and RDK X5 to support PX4-based UAV development for GNSS-denied, VTOL, and multi-sensor applications.
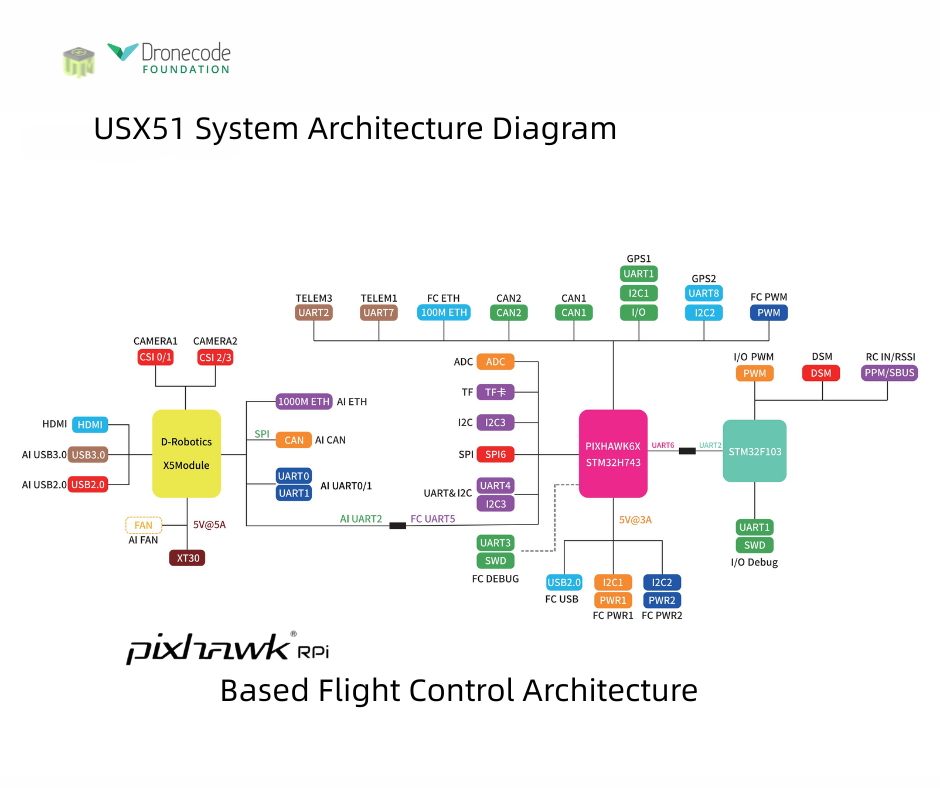
The system is designed to support PX4-based UAV development while separating real-time flight control tasks from high compute perception workloads. This decoupled architecture helps maintain flight stability while allowing developers to expand into vision based and autonomous applications.
The USX51 supports development scenarios including:
- GNSS-denied navigation
- VTOL mission platforms
- Multi-sensor integration
- Visual perception and tracking
- ROS2-based robotics workflows
- Research and autonomous UAV development

The Pixhawk 6X handles flight critical control functions, while the RDK X5 module provides onboard computing capability for visual processing, sensor fusion, and autonomous related workloads.
The system also provides multiple communication interfaces including Ethernet, CAN, UART and I2C, allowing developers to integrate cameras, thermal modules, lidar systems, and additional peripherals into their UAV projects.
Current ecosystem development around USX51 includes PX4 integration, ROS2 workflows, developer testing programs, and community based project collaboration.